
В рубрику "Центры обработки данных (ЦОД)" | К списку рубрик | К списку авторов | К списку публикаций
События последнего времени, такие как аварии на АЭС в Чернобыле и "Фукусима-1" в Японии, взрывы на различных складах хранения боеприпасов в России показали, что без применения робототехнических комплексов различного назначения устранение последствий подобных техногенных катастроф сопряжено с большими затратами и возможными человеческими жертвами. Однако, несмотря на относительный успех при применении робототехнических комплексов при ликвидации ЧС на складах хранения боеприпасов в Башкирии и Удмуртии, практика показала, что применяемые в настоящее время системы беспроводного управления РТК принципиально не способны решать возложенные на них задачи. Выявленные недостатки в виде небольшой и нестабильной дальности связи, низкой помехоустойчивости, малой скорости передачи данных, неспособности обеспечить одновременную работу с несколькими РТК в составе роботизированной группировки, в целом не позволяют выполнять задачи, необходимые при ликвидации ЧС.
Создание и использование современных робототехнических систем аварийно-спасательных комплексов невозможно без использования надежных каналов управления и передачи информации. Это связано как с необходимостью удаленного защищенного управления оператором данными механизмами, так и с необходимостью передачи от них оператору достаточно большого объема цифровых данных в виде видеоинформации с телекамер, тепловизоров, систем телеметрии и т.п. При этом данные требования существенно усугубляются условиями эксплуатации данных систем.
Необходимость удаления оператора на значительное безопасное расстояние, наличие мощных источников тепла, ионизирующего излучения, плотной городской застройки резко усложняют условия распространения радиосигналов. Соответственно многократно возрастают и требования к телекоммуникационным системам, способным в таких тяжелых условиях обеспечить высоконадежный и высокоскоростной обмен данными. Отсутствие систем беспроводной передачи информации, соответствующих предъявляемым к ним требованиям по надежности, защищенности, скорости передачи информации, вынуждает использовать различные системы, созданные для совершенно других целей. Например, различные Wi-Fi-системы, неспособные обеспечить передачу информации на расстояния более 300 м и требующие применения ретрансляторов в условиях плотной городской застройки [1].
Отдельно надо отметить выбор частотного диапазона для систем управления и передачи информации робототехническими системами аварийно-спасательных комплексов. Отсутствие специализированного оборудования беспроводной передачи информации для этих систем вынуждает применять бытовые и офисные устройства, работающие в безлицензионном диапазоне частот 2,4 ГГц. При этом совершенно не учитывается тот факт, что параметры распространения радиоволн в данном частотном диапазоне сильно зависят от условий окружающей среды. И заявляя работу на расстоянии 300 м, производители этой техники умалчивают, что эта дальность обеспечивается при сухой погоде на открытом пространстве и существенно уменьшается до уровня нескольких десятков метров после дождя в лесу или в городской застройке.
Пренебрежение вопросами выбора оптимального частотного диапазона и создания специализированных для применения в робототехнике средств беспроводной передачи данных обусловлено рядом факторов, общих как в России, так и за рубежом:
Данные факторы привели к тому, что основное развитие средств беспроводной передачи данных оказалось сконцентрировано в сфере БПЛА для различных тактических применений. В этой сфере за рубежом существует достаточно большое количество серийно производимого оборудования. Как пример можно привести серию модемов беспроводной передачи данных EnerLinks, работающих в диапазоне частот L-band (1700-1850 МГц)/S-band (2200-2500 МГц), Lower C-band (4400-4950 МГц) и upper Cband (5250-5850 МГц) компании ViaSat Inc. USA.
В России специализированные системы беспроводной передачи информации отсутствуют даже и для БПЛА тактического назначения, что является одной из причин, понуждающей осуществлять их закупки за рубежом. Однако данные системы, оптимальные для использования в БПЛА тактического назначения никоим образом не могут быть применены в робототехнике по причине принципиально другой сферы применения и соответственно совершенно других критериев по выбору оптимального частотного диапазона.
Все это привело к тому, что на сегодняшний день и в России, и за рубежом полностью отсутствуют какие-либо технические решения, позволяющие решить задачи по организации высоконадежного удаленного управления на приемлемые расстояния различными робототехническими комплексами и передачи с них больших объемов информации. Авария на АЭС "Фукусима-1" наглядно показала, что в стране, занимающей лидирующее место в мире по робототехнике, полностью отсутствуют какие-либо технические решения по роботам специального назначения для устранения последствий различных техногенных катастроф. Наспех переоборудованные роботы американской компании iRobot оказались не способны успешно решать возложенные на них задачи в условиях индустриальной застройки именно по причине отсутствия у них надлежащего канала управления, обеспечивающего работу РТК из безопасной для человека зоны.
В России ситуация обстоит аналогичным или даже худшим образом. Под каналы управления РТК приспосабливаются одноканальные устройства дистанционного управления для авиамоделей китайского производства, обеспечивающие работу по управлению максимум одним роботом только в отсутствие помех и препятствий, на расстояние порядка нескольких сот метров.
Учитывая постоянное возрастание скоростей передачи и обработки, а также объемов данных, необходимо создание автоматизированной системы на базе высокотехнологичных устройств, способных решать задачи по обеспечению высоконадежной защищенной беспроводной передачи информации.
Для решения данной проблемы в рамках Федеральной целевой программы "Исследования и разработки по приоритетным направлениям развития научно-технологического комплекса России на 2007-2013 гг." была проведена ОКР по теме: "Разработка беспроводной защищенной информационно-телекоммуникационной системы робототехнических комплексов для работы в критических условиях с использованием радиомодемов УКВ-диапазона на основе технологии OFDM и средств спутниковой связи", шифр работы "2011-2.4-524-008-002".
В рамках данной ОКР была разработана автоматизированная система на базе универсальных радиомодемов УКВ-диапазона для передачи данных с использованием сигнально-кодовых конструкций на основе OFDM-модуляции, работающих в оптимальном для использования в приземной зоне диапазоне частот 100-500 МГц с возможностью резервирования канала передачи информации. Данная совокупность технологий обеспечила высоконадежную защищенную передачу цифровой информации в тяжелых условиях распространения радиосигнала, в том числе при наличии многолучевого приема и эффекта Доплера, а также в условиях управления робототехническими комплексами на большом удалении при помощи технологии ретрансляции сигналов с использованием воздушных и/или наземных ретрансляторов.
Разработанный комплекс оборудования обеспечивает пакетную передачу цифровой информации с использованием технологии Ethernet с поддержкой TCP- и UDP-протоколов на расстояния до 5 км в условиях прямой видимости и непреднамеренных помех с обеспечением максимальной скорости передачи информации:
Общая схема системы передачи с использованием OFDM-сигналов представлена на рис. 1.
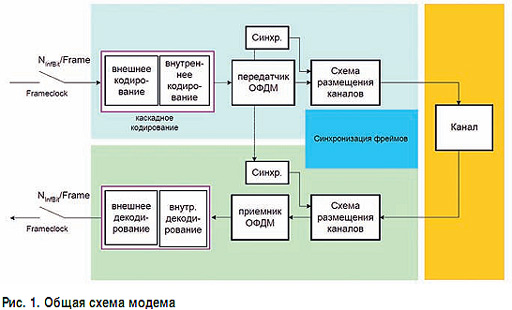
Основными составными частями передатчика являются кодер СКК, использующий каскадное кодирование, передатчик ОФДМ, схема размещения каналов и блок синхронизации (синхр.).

Главные блоки приемника - схема размещения каналов, приемник ОФДМ, блок синхронизации, декодер СКК. Для передачи информации используется квадратурная амплитудная модуляция КАМ (QAM) с алфавитом - m от 4 и более, то есть QAM4, QAM16, QAM64, ОАМ256, QAM1024 [2].
В заключение можно отметить, что эксперименты, проведенные с макетом радиомодема мощностью 50 мВт, показали возможность передачи в полосе 25 кГц фотографий и малокадрового видео по направлению "машина - база" со скоростью передачи данных 128 кбит/с. При использовании направленной антенны на крыше 6-этажного дома и штыревой антенны на автомобиле дальность связи составила примерно 2,7 км.
В дальнейшем предполагаются натурные испытания прототипа модема мощностью 1 и 10 Вт, что позволит оценить реальные характеристики по дальности действия такого радиомодема для принятых технических решений, то есть при различных видах QAM и характеристиках сигнально-кодовых конструкций.
Литература
Опубликовано: Журнал "Технологии и средства связи" #3, 2013
Посещений: 17635
Статьи по теме
Автор
| |||
В рубрику "Центры обработки данных (ЦОД)" | К списку рубрик | К списку авторов | К списку публикаций

