
В рубрику "Решения корпоративного класса" | К списку рубрик | К списку авторов | К списку публикаций

Григорий Прасько
Адьюнкт, Военная академия связи

Виктор Снежко
Доцент, кандидат технических наук, Военная академия связи
 При обеспечении услуги позиционирования операторами сетей сухопутной подвижной радиосвязи (ССПР) возникает необходимость в определении территории, на которой будет удовлетворяться требуемое качество данной услуги, прежде всего по точности. Оператор и потребитель должны знать, с каким качеством и на какой территории данная услуга предоставляется. Форма и размеры территории, получившей название рабочей зоны, зависят от энергетики радиолиний и геометрии расположения базовых станций (БС), играющих роль опорных станций (ОС) при позиционировании.
При обеспечении услуги позиционирования операторами сетей сухопутной подвижной радиосвязи (ССПР) возникает необходимость в определении территории, на которой будет удовлетворяться требуемое качество данной услуги, прежде всего по точности. Оператор и потребитель должны знать, с каким качеством и на какой территории данная услуга предоставляется. Форма и размеры территории, получившей название рабочей зоны, зависят от энергетики радиолиний и геометрии расположения базовых станций (БС), играющих роль опорных станций (ОС) при позиционировании.
Влияние энергетики исследовано в предыдущей работе авторов (Снежко В.К., Прасько Г.А. О рабочих зонах позиционирования в ССПР // Технологии и средства связи. 2008. № 4). В данной статье рассматриваются результаты исследования влияния геометрии размещения ОС посредством таких широко используемых в радионавигации понятий, как геометрический фактор (ГФ) и рабочая зона (РЗ).
 Рабочая зона системы позиционирования ССПР есть участок земной поверхности, на которой оператор гарантирует услугу позиционирования требуемого качества по точности определения координат. Размеры ее устанавливаются путем точного измерения радионавигационных параметров, вычислением навигационных параметров и максимального значения ГФ, при котором удовлетворяются требования потребителя или заказчика по точности определения местоположения объекта:
Рабочая зона системы позиционирования ССПР есть участок земной поверхности, на которой оператор гарантирует услугу позиционирования требуемого качества по точности определения координат. Размеры ее устанавливаются путем точного измерения радионавигационных параметров, вычислением навигационных параметров и максимального значения ГФ, при котором удовлетворяются требования потребителя или заказчика по точности определения местоположения объекта:

где σ*iÏ - требуемое среднеквадратическое отклонение погрешности определения местоположения объекта; σiÏ - среднеквадратическое отклонение погрешности вычисления навигационных параметров.
У заказчиков эти требования могут отличаться, поэтому значения ГФ и размеры РЗ могут быть разными. Важно знать, от чего они зависят, о чем будет сказано ниже.
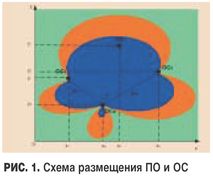
В ССПР, как и вообще в радионавигации, широко используется разностно-дальномерный метод определения местоположения объекта на земной поверхности. При данном методе используются три ОС: ОСВ - ведущая ОС, ОС1 и ОС2 - ведомые ОС (рис. 1). Кроме того, на рис. 1 представлены РЗ для ГФ, равного 5 (синего цвета) и 10 (оранжевого цвета). Из рисунка также видно, что с увеличением ГФ увеличивается и РЗ, но при этом, как следует из (1), снижается точность определения местоположения объекта, то есть σ*iÏ возрастает.
Таким образом, размер рабочей зоны определяется геометрическим фактором, который в свою очередь зависит от углов между базами Φ при заданном значении баз b1в и b2в.
 В процессе исследований была разработана методика и рабочая программа расчета рабочих зон на основе градиентной матрицы. Достоинство методики заключается в том, что она позволяет рассчитывать рабочие зоны и их площади при любом количестве ОС и любой их топологии. Расчеты проведены для соты ведущей станции, в других сотах ситуации будут повторяться. Местоположение ОСВ задавалось случайно в декартовой системе координат, поскольку размеры рабочих зон не зависят от координат ее расположения. Поэтому полученные результаты справедливы для любого местоположения ОСВ.
В процессе исследований была разработана методика и рабочая программа расчета рабочих зон на основе градиентной матрицы. Достоинство методики заключается в том, что она позволяет рассчитывать рабочие зоны и их площади при любом количестве ОС и любой их топологии. Расчеты проведены для соты ведущей станции, в других сотах ситуации будут повторяться. Местоположение ОСВ задавалось случайно в декартовой системе координат, поскольку размеры рабочих зон не зависят от координат ее расположения. Поэтому полученные результаты справедливы для любого местоположения ОСВ.
По разработанной методике проводились все расчеты РЗ. Зависимость относительной площади РЗ × S/Smax от угла Φ для ГФ, равного 2, 3, 5, 10, представлена на рис. 2. Здесь S есть площадь рабочей зоны для данного угла, ф, а Smax - максимальное значение площади РЗ при изменении Φ от 0 до 180 градусов. Угол Φ, соответствующий Smax, обозначен Φmах. Анализ графиков показывает, что Φmах не остается постоянным и возрастает с ростом ГФ. При малых значениях ГФ (2, 3) изменение площади рабочей зоны более резкое, при больших значениях ГФ (5, 10) - более плавное.
При заданном требовании к точности (1), то есть к значению ГФ, имеются углы Φmах, обеспечивающие максимальные площади рабочих зон. Это означает, что при необходимости можно построить график зависимости Фтах от требуемой точности.
Увеличение числа БС, используемых для позиционирования, влияет на значение ГФ, а следовательно, наточность и рабочую зону. Рассмотрим рабочую зону для случая использования четырех БС в интересах позиционирования. Для исследования были выбраны четыре варианта размещения трех основных БС при Φ, равном 60, 90, 120 и 180 градусам, и фиксированном размере баз, а четвертая БС при этом перемещается вокруг оси 0Х против часовой стрелки от 0 до 360 градусов. Результаты расчетов представлены на рис. 4. Здесь S - значение площади для данного Φ и Ψ, Smax - максимальное значение площадей из всех рассчитанных для четырех значений Φ и изменении Ψ от 0 до 360 градусов. Как видно из графиков, при Φ, равном 180°, имеется два максимума, а при Φ, равном 60°, получаются наибольшие отличия площадей РЗ при изменении Φ. Максимальные значения рабочих зон получаем для угла Ψ, равного 270° для всех значений ГФ, и наибольшее из максимальных значений при Φ, равном 120° также для всех ГФ.
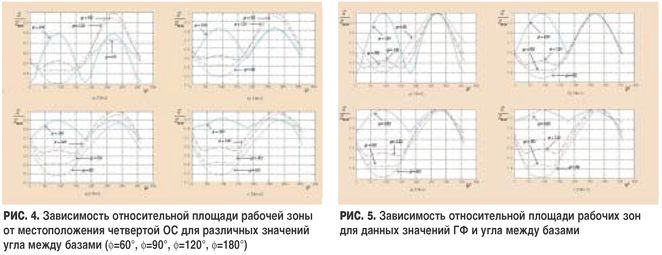
На рис. 5 представлена зависимость относительной площади рабочей зоны от угла Ψ, где Smax - максимальное значение площади для исследуемого значения Φ при изменении Ψ от 0 до 360 градусов. При больших ГФ (5, 10) и Φ = 180° площадь изменяется в пределах 20% при изменении Ψ от 0 до 360 градусов. При малых значениях ГФ (2, 3) изменение площади при Φ=180° лежит в пределах 30-80%. При других углах Φ изменение площади имеет более сложный характер. Оптимальным для всех ГФ является угол Φ, равный 270°. Таким образом, максимальную площадь РЗ получаем при Φ=120° и Φ=270° для всех ГФ.
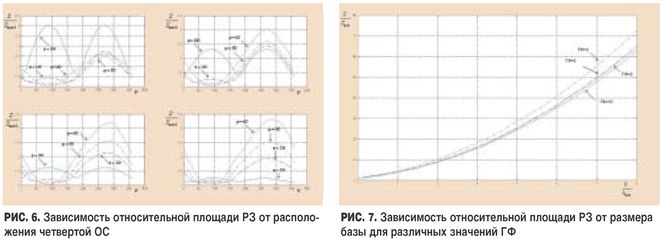
На рис. 6 представлены зависимости относительной площади РЗ от расположения четвертой БС по отношению к площади РЗ для трех ОС с различными значениями ГФ. Здесь Smax3 является максимальной площадью рабочей зоны для трех станций. Из представленных результатов расчета видим, что дополнительная БС значительно увеличивает площадь РЗ.
В ходе исследования также был проведен анализ влияния размера баз на площадь рабочей зоны. Результаты исследований представлены на рис. 7, где S/Smax - отношение площади к минимальной площади, b/bmax - отношение длины базы к минимальной длине базы. Из рисунка видно, что зависимость изменения площади от изменения баз практически близка к квадратичной, особенно для больших значений ГФ. Этот результат может быть использован при оценке рабочих зон для любых баз, если известна рабочая зона для одной из них.

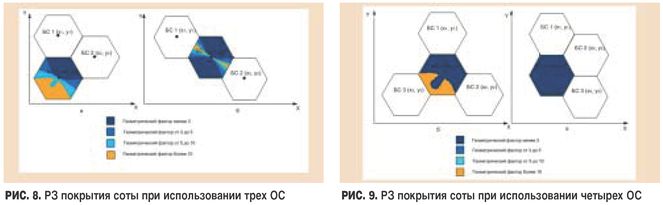
Приведенные выше результаты не связаны с расположением БС для конкретной структуры ССПР. Если использовать стандартную структуру сети, то зависимость площади рабочих зон будет меняться от числа БС в зависимости от топологии их расположения. Были рассмотрены все возможные варианты топологии для стандартных структур ССПР, выявлены наилучшие и наихудшие варианты по критерию максимума рабочих зон. Результаты представлены в таблице и на рис. 8-9, при этом на рисунках индексом "а" обозначены наилучшие варианты, индексом "б" - наихудшие.
В таблице указан процент покрытия соты ведущей станции рабочей зоной для различных значений ГФ. Здесь же видно, что при числе станций в системе позиционирования не более трех для наилучшего варианта мы имеем 71% покрытия соты, при этом ГФ не превышает 3. Для наихудшего варианта в целях обеспечения высокой точности определения местоположения получаем 48% покрытия соты ведущей станции. Для четырех станций при наилучшем варианте обеспечивается 100%-ное покрытие соты, для наихудшего - только 74%, но даже в этом случае при ГФ не более 5 покрывается 100% территории. При числе станций более 5 обеспечивается 100%-ное покрытие территории даже при ГФ не более 3. Это важный вывод для практики, из которого следует, что для определения местоположения объектов увеличение числа станций, являющихся опорными, больше четырех не играет существенной роли для расширения площади рабочих зон и повышения точности определения местоположения.
Итак, подчеркнем, что размер территории покрытия услугой позиционирования определяется не только геометрией, но и энергетикой. Оба фактора необходимо учитывать операторам и потребителям, оценивая территорию покрытия. Учет только одного из них не будет отражать реальную ситуацию по услуге позиционирования. Для оценок можно использовать результаты и методику, предложенную в данной работе и в ранее опубликованной статье по данной проблеме.
Опубликовано: Журнал "Технологии и средства связи" #3, 2009
Посещений: 7093
Статьи по теме
Автор
| |||
Автор
| |||
В рубрику "Решения корпоративного класса" | К списку рубрик | К списку авторов | К списку публикаций

