
В рубрику "Решения операторского класса" | К списку рубрик | К списку авторов | К списку публикаций

Кирилл Зотов, директор ООО "ОптоКОМ"
Мобильные системы сотовой связи на сегодняшний день являются одним из наиболее бурно развивающихся направлений телекоммуникационных услуг. В перечень штатных услуг сотовой связи уже давно вошли трансляция радио, MMS, GPRS, WAP и многие другие функции, не имеющие прямого отношения к передаче голосовых данных. Среди прочих ярко выделяется услуга позиционирования мобильной станции. Данная услуга относительно нова и еще не до конца апробирована конечными пользователями.
В настоящее время происходит бурный рост выпуска мобильных станций в рамках сотовых систем связи. Новые марки мобильных станций бизнес-класса уже содержат не только встроенные навигаторы, но и карты местностей, на которых данный мобильный телефон будет реализован. Безусловно, в рамках такого роста количества оконечных устройств происходят и попытки улучшения качества определения местонахождения (позиционирования).
Одними из основных способов позиционирования в сотовых системах являются внутрисистемные способы (метод триангуляций, метод поиска по углу прихода сигнала на антенну базовой станции и т.д.), а также глобальное позиционирование при помощи систем искусственных спутников Земли (ИСЗ). Существуют две основные системы навигации с использованием ИСЗ – это американская система GPS и российский ГЛОНАСС. Обе системы ориентированы на военные министерства стран-производителей. В них априори введены дополнительные помехи для исключительно частного использования на территории других государств и стран. Таким образом, говорить о высокой точности не приходится, хотя точность определения местонахождения в современных системах спутниковой навигации составляет до 30 м в S/A-режиме (Министерство обороны США вносит искусственные ошибки в навигационные данные, передаваемые со спутников). В случае ГЛОНАСС точность доходит до 10 м, однако количество ИСЗ постоянно меняется, что влияет на стабильность работы системы.
Вышеперечисленные причины вынуждают создавать и развивать наземную систему навигации, не привязанную к силовым ведомствам и дорогостоящему космическому оборудованию. Такие системы возможно построить на базе сотовых систем связи.
В системах сотовой связи стандарта GSM 900/1800 позиционирование стандартными средствами сети на сегодняшний день дает достаточно большую погрешность (до 1 000 м), так как существующие методы, основанные на классических и статистических моделях распространения радиосигнала, не учитывают свойств канала распространения.
Рассматривается система, состоящая из трех базовых станций (БС) и мобильной станции (MSreal). Предполагается, что стандартными средствами сотовой сети были измерены углы прихода сигнала на БС от МС и расстояния до МС (из времени прихода отклика сигнала, echo-команда, zero-sms и т.д.). Триангуляция (от лат. triangulum – треугольник) – один из методов создания сети опорных геодезических пунктов и сама сеть, построенная по этому методу – формируется из рядов или сетей примыкающих друг к другу треугольников и за счет определения положения их вершин в избранной системе координат. В каждом треугольнике измеряют все три угла, а одну из его сторон определяют путем последовательного решения предыдущих треугольников, начиная от того из них, в котором одна из сторон получена с помощью измерений и называется базисной стороной.
В случае использования априорных сведений о свойствах канала, где развертывается данная сотовая связь (геоинформационные системы), можно говорить о некоторой изначальной погрешности, связанной с большим количеством различных помех в канале распространения радиосигнала. Попробуем описать некоторые виды этих помех для рассмотрения возможного повышения точности определения местонахождения.
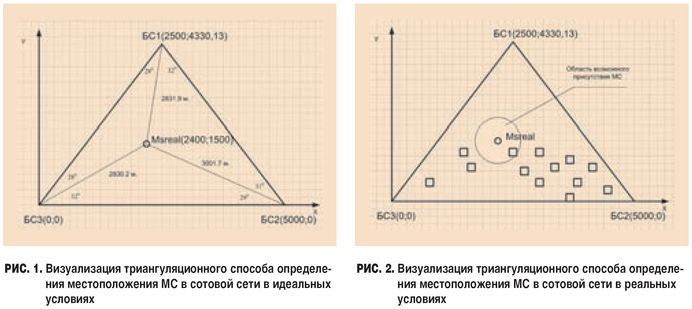
Предположим, что мобильная станция находится между базовыми станциями (БС), расположенными в вершинах равностороннего треугольника, как показано на рис. 1. Однако данная модель имеет ряд ограничений:
На сегодняшний день существует множество методов и способов увеличения точности определения положения в сотовых сетях. Часть из них относится к инструментальным, другие – к методологическим проблемам.
Из треугольника БС3-МС-БС2 ищем сторону МС-БС2 и т.д.
С помощью программного пакета математической системной алгебры Maple 6.0, находим координаты МС. Все три системы уравнений выдали одинаковое решение МС (2374,82; 1454,99) На рис. 2 показаны реальная и вычисленные точки. Погрешность составила ±133,03 м в идеальных условиях.
Теперь добавим некий коэффициент урбанизации Кurb по направлениям распространения сигнала. На рис. 2 показана возможная случайная концентрация городских сооружений, имеющих некое влияние на распространение сигнала сотовой сети. Область возможного присутствия мобильной станции соответствует вычислениям в идеальных условиях (рис. 2).
Коэффициент урбанизации Кurb в направлении БС1-МС берем равным нулю, в направлении БС3-МС берем таким, что его влияние дает ошибку измерения расстояния от БС3 до МС 50 м, а от БС2 до МС – 100 м.
 Введение такой ошибки дает среднюю ошибку вычисления координат МС 530,32 м (рис. 3).
Введение такой ошибки дает среднюю ошибку вычисления координат МС 530,32 м (рис. 3).
Однако введение коэффициента урбанизации Кurb приведет и к изменениям в измерении угла прихода сигнала на антенну БС. Принимая во внимание возможное изменение в ±10, получаем среднюю ошибку вычисления координат МС 133,58 м. Рис. 3 иллюстрирует полученную область с учетом свойств канала.
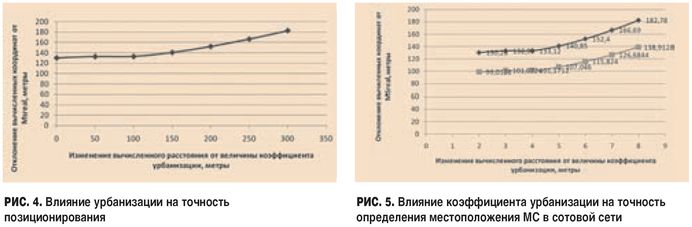
Очевидно, что коэффициент урбанизации Кurb имеет значительное влияние на определение координат. Рис. 4 иллюстрирует зависимость точности определения координат МС от величины ошибки определения расстояния от БС до МС стандартными средствами сотовой сети.
Таким образом, в густонаселенных районах города ошибка вычисления координат достигает сотен метров.
Однако, если ввести в уравнения коэффициент урбанизации Кurb, адекватный плотности населения того или иного района города, то влияние этой ошибки можно уменьшить.
Вводим в основное уравнение коэффициент урбанизации Кurb в виде R, равного минимальному отклонению без учета коэффициента урбанизации 128,04 м.
Решением будет точка с координатами (2383,1876; 1368,8954).
В этом случае ошибка составила 132,17 м, а без учета R - 174,18; точность определения увеличилась на 24%. Рис. 5 наглядно показывает, как изменяется ошибка вычисления с учетом коэффициента урбанизации.
Опубликовано: Журнал "Технологии и средства связи" #3, 2010
Посещений: 9135
Автор
| |||
В рубрику "Решения операторского класса" | К списку рубрик | К списку авторов | К списку публикаций
