
ąÆ čĆčāą▒čĆąĖą║čā "ąĪą┐čāčéąĮąĖą║ąŠą▓ą░čÅ čüą▓čÅąĘčī" | ąÜ čüą┐ąĖčüą║čā čĆčāą▒čĆąĖą║ | ąÜ čüą┐ąĖčüą║čā ą░ą▓č鹊čĆąŠą▓ | ąÜ čüą┐ąĖčüą║čā ą┐čāą▒ą╗ąĖą║ą░čåąĖą╣

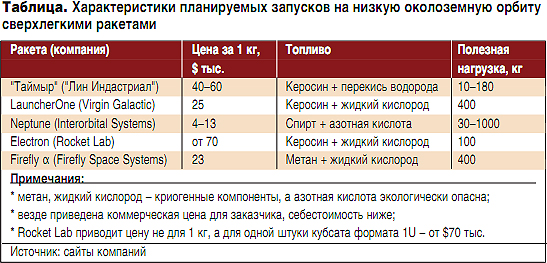
ąĪąŠąĘą┤ą░ąĮąĖąĄ čüą▓ąĄčĆčģą╗ąĄą│ą║ąĖčģ čĆą░ą║ąĄčé-ąĮąŠčüąĖč鹥ą╗ąĄą╣ (čü ą╝ą░čüčüąŠą╣ ą┐ąŠą╗ąĄąĘąĮąŠą╣ ąĮą░ą│čĆčāąĘą║ąĖ, ą▓čŗą▓ąŠą┤ąĖą╝ąŠą╣ ąĮą░ ąĮąĖąĘą║čāčÄ ąŠą║ąŠą╗ąŠąĘąĄą╝ąĮčāčÄ ąŠčĆą▒ąĖčéčā, ą┐čĆąĖą╝ąĄčĆąĮąŠ ą┤ąŠ 100 ą║ą│) ą▓ ą┐ąŠčüą╗ąĄą┤ąĮąĖąĄ ą│ąŠą┤čŗ čüčéą░ą╗ąŠ ą░ą║čéčāą░ą╗čīąĮąŠą╣ ąĘą░ą┤ą░č湥ą╣. ąŁč鹊 ą▓čŗąĘą▓ą░ąĮąŠ ą▒čāą╝ąŠą╝ ą╝ą░ą╗čŗčģ čüą┐čāčéąĮąĖą║ąŠą▓. ą£ąĮąŠąČąĄčüčéą▓ąŠ čüčéą░čĆčéą░ą┐ąŠą▓ ą▓ ą╝ąĖčĆąĄ ą┐čŗčéą░čÄčéčüčÅ čĆą░ąĘčĆą░ą▒ąŠčéą░čéčī čüą▓ąĄčĆčģą╗ąĄą│ą║čāčÄ čĆą░ą║ąĄčéčā. ąØąĖąČąĄ ą▓ čéą░ą▒ą╗ąĖčåąĄ ą┐čĆąĖą▓ąŠą┤čÅčéčüčÅ ąŠčüąĮąŠą▓ąĮčŗąĄ č鹥čģąĮąĖą║ąŠ-菹║ąŠąĮąŠą╝ąĖč湥čüą║ąĖąĄ čģą░čĆą░ą║č鹥čĆąĖčüčéąĖą║ąĖ čéą░ą║ąĖčģ čĆą░ą║ąĄčé ąŠčé čüą░ą╝čŗčģ ąĖąĘą▓ąĄčüčéąĮčŗčģ ą║ąŠą╝ą┐ą░ąĮąĖą╣ (ą▓čüąĄą│ąŠ ąŠ ą┐ą╗ą░ąĮą░čģ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ čüą▓ąĄčĆčģą╗ąĄą│ą║ąĖčģ čĆą░ą║ąĄčé ąĘą░čÅą▓ą╗čÅą╗ąĖ ą┤ąĄčüčÅčéą║ąĖ ąŠčĆą│ą░ąĮąĖąĘą░čåąĖą╣).
ą×ą┤ąĮą░ ąĖąĘ čüą╗ąŠąČąĮąŠčüč鹥ą╣ ą┐čĆąĖ čüąŠąĘą┤ą░ąĮąĖąĖ ą╝ą░ą╗ąĄąĮčīą║ąŠą╣ čĆą░ą║ąĄčéčŗ ŌĆō ą▒čÄą┤ąČąĄčéąĮą░čÅ čüąĖčüč鹥ą╝ą░ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ.
ąĪąŠąĘą┤ą░ąĮąĖąĄ čüąĖčüč鹥ą╝čŗ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┤ą╗čÅ čĆą░ą║ąĄčéčŗ-ąĮąŠčüąĖč鹥ą╗čÅ čĆą░ąĘą╝ąĄčĆąĮąŠčüčéąĖ ąĮą░ąĮąŠą║ą╗ą░čüčüą░ (ą▓ąĄą╗ąĖčćąĖąĮą░ ą┐ąŠą╗ąĄąĘąĮąŠą╣ ąĮą░ą│čĆčāąĘą║ąĖ (ą¤ąØ) ąŠčé 1 ą┤ąŠ 10, ą▓ąŠąĘą╝ąŠąČąĮąŠ, ą┤ąŠ 100 ą║ą│) ą┐ąŠą┤čĆą░ąĘčāą╝ąĄą▓ą░ąĄčé ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠčüčéčī ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ čüąŠą▓čĆąĄą╝ąĄąĮąĮčŗčģ 菹╗ąĄą║čéčĆąŠąĮąĮčŗčģ ą║ąŠą╝ą┐ąŠąĮąĄąĮč鹊ą▓ ą╝ą░ą╗ąŠą╣ ą╝ą░čüčüčŗ ąĖ čüč鹊ąĖą╝ąŠčüčéąĖ ą┐čĆąĖ ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖąĖ ąĘą░ą┤ą░ąĮąĮčŗčģ č鹊čćąĮąŠčüčéąĖ ąĖ ąĮą░ą┤ąĄąČąĮąŠčüčéąĖ. ą×č湥ą▓ąĖą┤ąĮąŠ, čćč鹊 čŹčéąĖ čāčüą╗ąŠą▓ąĖčÅ ą┐čĆąŠčéąĖą▓ąŠčĆąĄčćą░čé ą┤čĆčāą│ ą┤čĆčāą│čā, ą┐ąŠčŹč鹊ą╝čā ą┐ąŠąĖčüą║ ąŠą┐čéąĖą╝ą░ą╗čīąĮąŠą│ąŠ čĆąĄčłąĄąĮąĖčÅ ąĘą░čéčĆčāą┤ąĮčÅąĄčéčüčÅ.
ąśčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ MEMS-č鹥čģąĮąŠą╗ąŠą│ąĖą╣ ą▓ą╝ąĄčüč鹊 ą╝ąĄčģą░ąĮąĖč湥čüą║ąĖčģ ą│ąĖčĆąŠčüą║ąŠą┐ąŠą▓ ąĖ ą░ą║čüąĄą╗ąĄčĆąŠą╝ąĄčéčĆąŠą▓ ąĖą╗ąĖ ą▓ąŠą╗ąŠą║ąŠąĮąĮąŠ-ąŠą┐čéąĖč湥čüą║ąĖčģ ą╗ą░ąĘąĄčĆąĮčŗčģ ą┤ą░čéčćąĖą║ąŠą▓ čāą│ą╗ąŠą▓ąŠą╣ čüą║ąŠčĆąŠčüčéąĖ čéčĆąĄą▒čāąĄčé čüą┐ąĄčåąĖą░ą╗čīąĮąŠą│ąŠ ąĖčüčüą╗ąĄą┤ąŠą▓ą░ąĮąĖčÅ ą▓ą▓ąĖą┤čā ą▒ąŠą╗ąĄąĄ čüąĖą╗čīąĮąŠą│ąŠ ą▓ą╗ąĖčÅąĮąĖčÅ ąĮą░ ąĮąŠą▓čŗąĄ ą┤ą░čéčćąĖą║ąĖ čäą░ą║č鹊čĆąŠą▓ čĆą░ą║ąĄčéąĮąŠą│ąŠ ą┐ąŠą╗ąĄčéą░. ąÆ ąŠčéą╗ąĖčćąĖąĄ ąŠčé ą║ąŠčüą╝ąĖč湥čüą║ąŠą│ąŠ ą░ą┐ą┐ą░čĆą░čéą░ čĆą░ą║ąĄčéą░-ąĮąŠčüąĖč鹥ą╗čī ą┐ąŠą┤ą▓ąĄčĆą│ą░ąĄčéčüčÅ ą▓ąŠąĘą┤ąĄą╣čüčéą▓ąĖčÄ čüą┐ąĄčåąĖčäąĖč湥čüą║ąĖčģ čäą░ą║č鹊čĆąŠą▓ ą║ąŠčüą╝ąĖč湥čüą║ąŠą│ąŠ ą┐ąŠą╗ąĄčéą░ ąĄą┤ąĖąĮąĖčåčŗ ą╝ąĖąĮčāčé. ąÆąĄčüčī čāčćą░čüč鹊ą║ ą▓čŗą▓ąĄą┤ąĄąĮąĖčÅ ąĮą░ ąĮąĖąĘą║čāčÄ ąŠą║ąŠą╗ąŠąĘąĄą╝ąĮčāčÄ ąŠčĆą▒ąĖčéčā ąĘą░ąĮąĖą╝ą░ąĄčé 5ŌĆō15 ą╝ąĖąĮčāčé, ą┐čĆąĖč湥ą╝ ą┤ąŠ č鹊ą│ąŠ, ą║ą░ą║ čĆą░ą║ąĄčéą░ ą┐ąŠą┤ąĮąĖą╝ąĄčéčüčÅ ą▓čŗčłąĄ 40 ą║ą╝, čāčüą╗ąŠą▓ąĖčÅ čĆą░ą▒ąŠčéčŗ čüąĖčüč鹥ą╝čŗ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą╝ą░ą╗ąŠ ąŠčéą╗ąĖčćą░čÄčéčüčÅ ąŠčé čĆą░ą▒ąŠčéčŗ ąĮą░ ą╗čÄą▒ąŠą╝ čéčĆą░ąĮčüą┐ąŠčĆčéąĮąŠą╝ čüčĆąĄą┤čüčéą▓ąĄ.
ąĪąŠą┤ąĄčƹȹ░č鹥ą╗čīąĮąŠą╣ čćą░čüčéčīčÄ čŹč鹊ą╣ čĆą░ą▒ąŠčéčŗ čÅą▓ą╗čÅąĄčéčüčÅ ąĖčüčüą╗ąĄą┤ąŠą▓ą░ąĮąĖąĄ čĆąĄą░ą╗čīąĮąŠ ą┤ąŠčüčéąĖąČąĖą╝ąŠą╣ č鹊čćąĮąŠčüčéąĖ ą▓čŗą▓ąĄą┤ąĄąĮąĖčÅ ąĮą░ ąŠčĆą▒ąĖčéčā ą┐čĆąĖ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĖ MEMS-ą┤ą░čéčćąĖą║ąŠą▓ ą┐ąŠą▓čŗčłąĄąĮąĮąŠą│ąŠ ą║ą╗ą░čüčüą░ č鹊čćąĮąŠčüčéąĖ. ą£ą░č鹥ą╝ą░čéąĖč湥čüą║ąŠąĄ ą╝ąŠą┤ąĄą╗ąĖčĆąŠą▓ą░ąĮąĖąĄ ą┐ąŠąĘą▓ąŠą╗ąĖą╗ąŠ ąŠą┐čĆąĄą┤ąĄą╗ąĖčéčī čĆą░ąĘą▒čĆąŠčü ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓ ąŠčĆą▒ąĖčéčŗ ą▓čŗą▓ąĄą┤ąĄąĮąĖčÅ ą┐ąŠ čĆąĄą░ą╗čīąĮčŗą╝ ą┤ą░ąĮąĮčŗą╝, čüąŠą▒čĆą░ąĮąĮčŗą╝ ąĮą░ 菹║čüą┐ąĄčĆąĖą╝ąĄąĮčéą░ą╗čīąĮąŠą╣ čāčüčéą░ąĮąŠą▓ą║ąĄ (ą╝ą░ą║ąĄč鹥).
ą¤čĆąŠą▓ąĄą┤ąĄąĮąĮąŠąĄ ąĖčüčüą╗ąĄą┤ąŠą▓ą░ąĮąĖąĄ ą▓ą║ą╗čÄčćą░ąĄčé ą▓ čüąĄą▒čÅ čüąŠąĘą┤ą░ąĮąĖąĄ 菹║čüą┐ąĄčĆąĖą╝ąĄąĮčéą░ą╗čīąĮąŠą╣ čāčüčéą░ąĮąŠą▓ą║ąĖ (ą┤ą░ą╗ąĄąĄ ŌĆō ą╝ą░ą║ąĄčéą░), ą▓ą║ą╗čÄčćą░čÅ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠąĄ ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖąĄ; ąĮą░ą▒ąŠčĆ čüčéą░čéąĖčüčéąĖą║ąĖ, ą░ąĮą░ą╗ąĖąĘ ą▓ąĄą╗ąĖčćąĖąĮ ąĖ ą┐čĆąĖčćąĖąĮ ąŠčłąĖą▒ąŠą║ ąĖ ą░ą╗ą│ąŠčĆąĖčéą╝ąŠą▓ ą┤ą╗čÅ ąĖčģ ą║ąŠčĆčĆąĄą║čåąĖąĖ.
MEMS-ą│ąĖčĆąŠčüą║ąŠą┐čŗ čüąĄą╣čćą░čü ą┐čĆąĖą╝ąĄąĮčÅčÄčéčüčÅ ąŠč湥ąĮčī čłąĖčĆąŠą║ąŠ ą▓ą▓ąĖą┤čā ąĖčģ ąĮąĖąĘą║ąŠą╣ čüč鹊ąĖą╝ąŠčüčéąĖ, ąŠą┤ąĮą░ą║ąŠ ą┤ą░čéčćąĖą║ąĖ ąĮąĖąĘčłąĄą╣ čåąĄąĮąŠą▓ąŠą╣ ą║ą░č鹥ą│ąŠčĆąĖąĖ ąĮąĄą┤ąŠčüčéą░č鹊čćąĮąŠ č鹊čćąĮčŗ ą┤ą╗čÅ ą▒ąŠą╗čīčłąĖąĮčüčéą▓ą░ ą┐čĆąĖą╝ąĄąĮąĄąĮąĖą╣ ą▓ čüąĖčüč鹥ą╝ą░čģ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ.
MEMS-ą│ąĖčĆąŠčüą║ąŠą┐čŗ čü čåąĄąĮąŠą╣ ą┐ąŠčĆčÅą┤ą║ą░ $100 ąĘą░ ąŠčüčī ąĖą╝ąĄčÄčé ą│ąŠčĆą░ąĘą┤ąŠ ą╗čāčćčłąĖąĄ čģą░čĆą░ą║č鹥čĆąĖčüčéąĖą║ąĖ č鹊čćąĮąŠčüčéąĖ ąĖ čüčéą░ą▒ąĖą╗čīąĮąŠčüčéąĖ, čćč鹊 ą┐ąŠąĘą▓ąŠą╗čÅąĄčé, ą┐ąŠ ą║čĆą░ą╣ąĮąĄą╣ ą╝ąĄčĆąĄ, ą┐ąŠą┐čŗčéą░čéčīčüčÅ ą┐ąŠčüčéčĆąŠąĖčéčī ąĮą░ ąĮąĖčģ čüąĖčüč鹥ą╝čā čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ (ąĪąŻ) ą║ąŠčüą╝ąĖč湥čüą║ąŠą╣ čĆą░ą║ąĄčéčŗ.
ąźąŠčéčÅ ą▓ ą║ąŠčüą╝ąĖč湥čüą║ąŠą╣ č鹥čģąĮąĖą║ąĄ ą┐čĆąĄą┤ą╗ą░ą│ą░ą╗ąŠčüčī ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī čéą░ą║ąĖąĄ ą│ąĖčĆąŠčüą║ąŠą┐čŗ ą┤ą╗čÅ ą▒čŗčüčéčĆąŠą│ąŠ ą▓ąŠčüčüčéą░ąĮąŠą▓ą╗ąĄąĮąĖčÅ ąŠčĆąĖąĄąĮčéą░čåąĖąĖ ą┐ąŠ ąĘą▓ąĄąĘą┤ąĮąŠą╝čā ą┤ą░čéčćąĖą║čā [1], ąĮąĖą║č鹊 ąĮąĄ čüčéą░ą▓ąĖą╗ čåąĄą╗čīčÄ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ąĖčģ ą║ą░ą║ ą┐ąĄčĆą▓ąĖčćąĮčŗąĄ ą┤ą░čéčćąĖą║ąĖ ąŠčĆąĖąĄąĮčéą░čåąĖąĖ.
ąĪčéčĆąŠą│ąŠ ą│ąŠą▓ąŠčĆčÅ, ą┐ąŠą╗ąĮąŠčüčéčīčÄ čéą▓ąĄčĆą┤ąŠč鹊ą┐ą╗ąĖą▓ąĮą░čÅ čĆą░ą║ąĄčéą░ čü ąĮą░ą║ą╗ąŠąĮąĮčŗą╝ čüčéą░čĆč鹊ą╝, ą║ą░ą║ čĆą░ąĮąĮąĖąĄ čÅą┐ąŠąĮčüą║ąĖąĄ čĆą░ą║ąĄčéčŗ-ąĮąŠčüąĖč鹥ą╗ąĖ Lamb-da-4S [2] ąĖ Mu-4S [3], ą╝ąŠąČąĄčé ą▓čŗą▓ąĄčüčéąĖ ąĮą░ ąŠčĆą▒ąĖčéčā čüą┐čāčéąĮąĖą║, ą▓ąŠąŠą▒čēąĄ ąĮąĄ ąĖčüą┐ąŠą╗čīąĘčāčÅ ąĖąĮąĄčĆčåąĖą░ą╗čīąĮčāčÄ ąĪąŻ ąĖą╗ąĖ čĆą░ą┤ąĖąŠč鹥čģąĮąĖč湥čüą║ąŠąĄ ą┤ąĖčüčéą░ąĮčåąĖąŠąĮąĮąŠąĄ čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ. ąÆ Lambda-4S ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ą╗ą░čüčī ąŠą┤ąĮąŠąŠčüąĮą░čÅ ąŠčĆąĖąĄąĮčéą░čåąĖčÅ, ąĄąĄ ą┤ą░čéčćąĖą║ąŠą╝ čüą╗čāąČąĖą╗ č湥čéčŗčĆąĄčģčĆą░ą╝ąŠčćąĮčŗą╣ ą╝ąĄčģą░ąĮąĖč湥čüą║ąĖą╣ ą│ąĖčĆąŠčüą║ąŠą┐. ąÆą╝ąĄčüč鹊 čŹč鹊ą│ąŠ ą╝ąŠąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ąŠą┤ąĮąŠąŠčüąĮčāčÄ čüąŠą╗ąĮąĄčćąĮčāčÄ ąŠčĆąĖąĄąĮčéą░čåąĖčÄ. ąĢčüą╗ąĖ ą┐čĆą░ą▓ąĖą╗čīąĮąŠ ą▓čŗą▒čĆą░čéčī ą╝ąŠą╝ąĄąĮčé ąĘą░ą┐čāčüą║ą░, čćč鹊ą▒čŗ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ąĮą░ čåąĄąĮčéčĆ ąĪąŠą╗ąĮčåą░ čüąŠą▓ą┐ą░ą┤ą░ą╗ąŠ čü ąČąĄą╗ą░ąĄą╝čŗą╝ ą┐ąŠą╗ąŠąČąĄąĮąĖąĄą╝ ąŠčüąĖ čĆą░ą║ąĄčéčŗ, ą╝ąŠąČąĮąŠ čüąŠčĆąĖąĄąĮčéąĖčĆąŠą▓ą░čéčī čĆą░ą║ąĄčéčā ą┐ąŠ čüąŠą╗ąĮąĄčćąĮąŠą╝čā ą┤ą░čéčćąĖą║čā ąĖ, ą┐ąŠ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮąŠą╝čā ąĘą░ą║ąŠąĮčā čĆą░čüčüčćąĖčéą░ą▓ ą▓ąĄčĆčłąĖąĮčā čéčĆą░ąĄą║č鹊čĆąĖąĖ, ąĘą░ą┐čāčüčéąĖčéčī ąĀąöąóąó, č鹊 čüą┐čāčéąĮąĖą║ ą▓čŗą╣ą┤ąĄčé ąĮą░ ąŠčĆą▒ąĖčéčā.
ą×ą┤ąĮą░ą║ąŠ ąĮą░čćąĖąĮą░čÅ čü ąĮąĄą║ąŠč鹊čĆąŠą╣ čĆą░ąĘą╝ąĄčĆąĮąŠčüčéąĖ, ąČąĖą┤ą║ąŠčüčéąĮčŗąĄ čüčéčāą┐ąĄąĮąĖ ąŠą║ą░ąĘčŗą▓ą░čÄčéčüčÅ ą┤ąĄčłąĄą▓ą╗ąĄ čéą▓ąĄčĆą┤ąŠč鹊ą┐ą╗ąĖą▓ąĮčŗčģ, ą┐ąŠčŹč鹊ą╝čā 菹║ąŠąĮąŠą╝ąĖč湥čüą║ąĖ čåąĄą╗ąĄčüąŠąŠą▒čĆą░ąĘąĮąŠ ą┐ąŠą┐čŗčéą░čéčīčüčÅ ą┐ąŠčüčéčĆąŠąĖčéčī čéą░ą║čāčÄ čĆą░ą║ąĄčéčā, ąĖčüą┐ąŠą╗čīąĘčāčÅ ą¢ąĀąö ąĮą░ ą┐ąĄčĆą▓ąŠą╣ čüčéčāą┐ąĄąĮąĖ. ąØąŠ ąČąĖą┤ą║ąŠčüčéąĮą░čÅ čüčéčāą┐ąĄąĮčī čéčĆąĄą▒čāąĄčé ą▓ąĄčĆčéąĖą║ą░ą╗čīąĮąŠą│ąŠ čüčéą░čĆčéą░ ąĖ ąŠą│čĆą░ąĮąĖč湥ąĮąĖčÅ čāą│ą╗ą░ ą░čéą░ą║ąĖ ąĖąĘ-ąĘą░ ą╝ą░ą╗ąŠą│ąŠ ąĘą░ą┐ą░čüą░ ą┐čĆąŠčćąĮąŠčüčéąĖ ą║ąŠąĮčüčéčĆčāą║čåąĖąĖ ąĖ ą╝ąĄąĮčīčłąĄą╣ čéčÅą│ąŠą▓ąŠąŠčĆčāąČąĄąĮąĮąŠčüčéąĖ. ąĪą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠ, čéą░ą║ąŠą╣ čĆą░ą║ąĄč鹥 ą┐ąŠąĮą░ą┤ąŠą▒ąĖčéčüčÅ ą┤ąĄčłąĄą▓ą░čÅ ąĖ ą╝ą░ą╗ąŠą│ą░ą▒ą░čĆąĖčéąĮą░čÅ čüąĖčüč鹥ą╝ą░ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ. ąĪ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ MEMS-ą┤ą░čéčćąĖą║ąŠą▓ ą╝ąŠąČąĮąŠ čüąŠąĘą┤ą░čéčī ąĪąŻ ą╝ą░čüčüąŠą╣ ą╝ąĄąĮąĄąĄ 1 ą║ą│ (ąĮąĄ čüčćąĖčéą░čÅ ą║ą░ą▒ąĄą╗čīąĮąŠą╣ čüąĄčéąĖ ąĖ ąĖčüą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗčģ ąŠčĆą│ą░ąĮąŠą▓).
ąöą╗čÅ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ ą┐čĆąĖą╝ąĄąĮąĖą╝ąŠčüčéąĖ MEMS-ą│ąĖčĆąŠčüą║ąŠą┐ąŠą▓ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠ čģąŠčéčÅ ą▒čŗ čćą░čüčéąĖčćąĮąŠ čüą╝ąŠą┤ąĄą╗ąĖčĆąŠą▓ą░čéčī čāčüą╗ąŠą▓ąĖčÅ ą┐ąŠą╗ąĄčéą░ ąĮą░ čĆą░ą║ąĄč鹥 ąĖ ą▓ąŠčüą┐čĆąŠąĖąĘą▓ąĄčüčéąĖ, ąĮą░čüą║ąŠą╗čīą║ąŠ čŹč鹊 ą▓ąŠąĘą╝ąŠąČąĮąŠ, čĆąĄą░ą║čåąĖčÄ ąĖčüą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗčģ ąŠčĆą│ą░ąĮąŠą▓ ąĮą░ čüąĖą│ąĮą░ą╗čŗ, ą┐ąŠčüčéčāą┐ą░čÄčēąĖąĄ čü MEMS-ą┤ą░čéčćąĖą║ąŠą▓.
ąöą╗čÅ ą┐ąŠąĖčüą║ąŠą▓čŗčģ čĆą░ą▒ąŠčé ą┐čĆąĖ ą▒ąŠą╗čīčłąŠą╣ čüč鹥ą┐ąĄąĮąĖ ąĮąĄąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮąŠčüčéąĖ ą║ąŠąĮąĄčćąĮąŠą│ąŠ čĆąĄąĘčāą╗čīčéą░čéą░ ą▒čŗą╗ą░ ą▓čŗą▒čĆą░ąĮą░ čüčģąĄą╝ą░ čĆą░ą║ąĄčéčŗ-ąĮąŠčüąĖč鹥ą╗čÅ, ąŠą▒ąĄčēą░ą▓čłą░čÅ ą╝ąĖąĮąĖą╝ą░ą╗čīąĮčāčÄ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéčī ąŠčé č鹊čćąĮąŠčüčéąĖ ąĖčüą┐ąŠą╗čīąĘčāąĄą╝ąŠą│ąŠ ą│ąĖčĆąŠčüą║ąŠą┐ą░. ąØąĄą║ąŠč鹊čĆąŠąĄ "ąĮčāą╗ąĄą▓ąŠąĄ" ą┐čĆąĖą▒ą╗ąĖąČąĄąĮąĖąĄ čéčĆąĄą▒ąŠą▓ą░ą╗ąŠ čüąĮąĖąČąĄąĮąĖčÅ čéčĆąĄą▒ąŠą▓ą░ąĮąĖą╣ ą║ ą│ąĖčĆąŠčüą║ąŠą┐ą░ą╝, ą┐ąŠčŹč鹊ą╝čā ą▒čŗą╗ąŠ čĆąĄčłąĄąĮąŠ ą▓ ą╝ąŠą┤ąĄą╗ąĖ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą▓ąĄčĆčģąĮąĖąĄ čüčéčāą┐ąĄąĮąĖ ąĮą░ ąĀąöąóąó, čüčéą░ą▒ąĖą╗ąĖąĘąĖčĆčāąĄą╝čŗąĄ ą▓čĆą░čēąĄąĮąĖąĄą╝.
ąĪąĖčüč鹥ą╝ą░ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┤ąŠą╗ąČąĮą░ čĆą░ą▒ąŠčéą░čéčī ą▓ čüąŠčüčéą░ą▓ąĄ ą│ąĖą┐ąŠč鹥čéąĖč湥čüą║ąŠą╣ čéčĆąĄčģčüčéčāą┐ąĄąĮčćą░č鹊ą╣ čĆą░ą║ąĄčéčŗ, čā ą║ąŠč鹊čĆąŠą╣ ą┐ąĄčĆą▓ą░čÅ čüčéčāą┐ąĄąĮčī ąČąĖą┤ą║ąŠčüčéąĮą░čÅ čüąŠ ą▓čĆąĄą╝ąĄąĮąĄą╝ čĆą░ą▒ąŠčéčŗ ąŠą║ąŠą╗ąŠ 150 čüąĄą║., ą░ ą▓ąĄčĆčģąĮąĖąĄ ą┤ą▓ąĄ ŌĆō čéą▓ąĄčĆą┤ąŠč鹊ą┐ą╗ąĖą▓ąĮčŗąĄ čü ąĮąĄą▒ąŠą╗čīčłąĖą╝ ą▓čĆąĄą╝ąĄąĮąĄą╝ čĆą░ą▒ąŠčéčŗ. ą¤ąŠą┤čĆą░ąĘčāą╝ąĄą▓ą░ąĄčéčüčÅ, čćč鹊 ą▓ąŠ ą▓čĆąĄą╝čÅ ą▒ą░ą╗ą╗ąĖčüčéąĖč湥čüą║ąŠą╣ ą┐ą░čāąĘčŗ ąĖ ą┐čĆąĖčåąĄą╗ąĖą▓ą░ąĮąĖčÅ ą┐ąŠ ąĪąŠą╗ąĮčåčā ąŠčĆąĖąĄąĮčéą░čåąĖčÅ ąŠą▒ąĄčüą┐ąĄčćąĖą▓ą░ąĄčéčüčÅ ą│ą░ąĘąŠą▓čŗą╝ąĖ čüąŠą┐ą╗ą░ą╝ąĖ, čĆą░ą▒ąŠčéą░čÄčēąĖą╝ąĖ ąĮą░ ą│ą░ąĘąĄ ąĮą░ą┤ą┤čāą▓ą░ 1-ą╣ čüčéčāą┐ąĄąĮąĖ.
ą£ąŠą┤ąĄą╗čīąĮą░čÅ čāčüčéą░ąĮąŠą▓ą║ą░ ą┤ąŠą╗ąČąĮą░ ąŠą▒ąĄčüą┐ąĄčćąĖčéčī ąŠčéą║ą╗ąŠąĮąĄąĮąĖąĄ ąĖąĘą╝ąĄčĆąĖč鹥ą╗čīąĮąŠą│ąŠ 菹╗ąĄą╝ąĄąĮčéą░ ą┤ą╗čÅ ąĖą╝ąĖčéą░čåąĖąĖ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ ą┐ąŠą╗ąĄčéą░ ą║ą░ą║ ą╝ąĖąĮąĖą╝čāą╝ ą┐ąŠ ą┤ą▓čāą╝ čāą│ą╗ą░ą╝ ŌĆō čéą░ąĮą│ą░ąČą░ ąĖ čĆčŗčüą║ą░ąĮąĖčÅ. ąŻą┐čĆą░ą▓ą╗čÅčÄčēą░čÅ ą┐čĆąŠą│čĆą░ą╝ą╝ą░ ą┤ąŠą╗ąČąĮą░ ąŠą▒ąĄčüą┐ąĄčćąĖą▓ą░čéčī ą┐ąĄčĆąĄą┤ą░čćčā ą┤ą░ąĮąĮčŗčģ ąĮą░ ą┐ąĄčĆčüąŠąĮą░ą╗čīąĮčŗą╣ ą║ąŠą╝ą┐čīčÄč鹥čĆ ą┤ą╗čÅ čĆąĄą│ąĖčüčéčĆą░čåąĖąĖ ąĖ ą┤ą░ą╗čīąĮąĄą╣čłąĄą╣ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ.
ąŻčüčéą░ąĮąŠą▓ą║ą░ čüąŠčüč鹊ąĖčé ąĖąĘ ą│ąŠą╗ąŠą▓ą║ąĖ čü ą┤ą░čéčćąĖą║ą░ą╝ąĖ, ą┤ą▓čāčģą║ąŠąŠčĆą┤ąĖąĮą░čéąĮąŠą│ąŠ ą║ą░čćą░čÄčēąĄą│ąŠčüčÅ čüč鹊ą╗ą░ čü 菹╗ąĄą║čéčĆąŠą╝ąĄčģą░ąĮąĖč湥čüą║ąĖą╝ąĖ ą┐čĆąĖą▓ąŠą┤ą░ą╝ąĖ, ą┐ą╗ą░čéčŗ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ, ąĖčüč鹊čćąĮąĖą║ą░ ą┐ąĖčéą░ąĮąĖčÅ (čüą╝. čĆąĖčü. 1). ąÜ čāčüčéą░ąĮąŠą▓ą║ąĄ ą┤ą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┐ąŠą┤ą║ą╗čÄčćą░ąĄčéčüčÅ ą┐ąĄčĆčüąŠąĮą░ą╗čīąĮčŗą╣ ą║ąŠą╝ą┐čīčÄč鹥čĆ č湥čĆąĄąĘ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗą╣ ą┐ąŠčĆčé (RS-232).

ąöą░čéčćąĖą║ ADIS16300 ą▓ą║ą╗čÄčćą░ąĄčé MEMS-ą│ąĖčĆąŠčüą║ąŠą┐ (ą┤ą░čéčćąĖą║ čāą│ą╗ąŠą▓ąŠą╣ čüą║ąŠčĆąŠčüčéąĖ) ą┐ąŠ ąŠčüąĖ Z čü čåąĖčäčĆąŠą▓čŗą╝ ą┐čĆąĄą┤čüčéą░ą▓ą╗ąĄąĮąĖąĄą╝ ą▓čŗčģąŠą┤ąĮąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ, 3-ąŠčüąĮčŗą╣ MEMS-ą░ą║čüąĄą╗ąĄčĆąŠą╝ąĄčéčĆ ą┐ąŠ ąŠčüčÅą╝ X, Y, Z, ą┤ą░čéčćąĖą║ č鹥ą╝ą┐ąĄčĆą░čéčāčĆčŗ ą┤ą╗čÅ ą║ąŠčĆčĆąĄą║čåąĖąĖ ąĮčāą╗čÅ ą│ąĖčĆąŠčüą║ąŠą┐ąŠą▓ ąĖ čé.ą┤. [4].
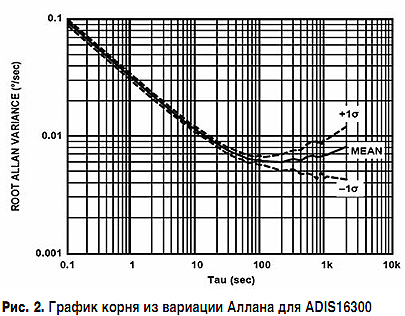
ąØą░ čĆąĖčü. 2 ą┐čĆąĖą▓ąĄą┤ąĄąĮ ą│čĆą░čäąĖą║ ą║ą▓ą░ą┤čĆą░čéąĮąŠą│ąŠ ą║ąŠčĆąĮčÅ ąĖąĘ ą▓ą░čĆąĖą░čåąĖąĖ ąÉą╗ą╗ą░ąĮą░, ąŠą┐ąĖčüčŗą▓ą░čÄčēąĖą╣ č鹊čćąĮąŠčüčéčī ąĖ čüčéą░ą▒ąĖą╗čīąĮąŠčüčéčī ą│ąĖčĆąŠčüą║ąŠą┐ą░. ąśąĘ čŹč鹊ą│ąŠ ą│čĆą░čäąĖą║ą░ čüą╗ąĄą┤čāąĄčé, čćč鹊 čüčéą░ą▒ąĖą╗čīąĮąŠčüčéčī ą│ąĖčĆąŠčüą║ąŠą┐ą░ ąĮą░ ą▓čĆąĄą╝ąĄąĮąĮčŗčģ ąĖąĮč鹥čĆą▓ą░ą╗ą░čģ ą▒ąŠą╗ąĄąĄ 100 čüąĄą║. ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčéčüčÅ čäą╗ąĖą║ąĄčĆ-čłčāą╝ąŠą╝ ąĖ ąĮąĄ ą╝ąŠąČąĄčé ąŠą▒ąĄčüą┐ąĄčćąĖčéčī ą▓ąĄą╗ąĖčćąĖąĮčā ą┤čĆąĄą╣čäą░ ą╗čāčćčłąĄ 25 ą│čĆą░ą┤. ą▓ čćą░čü. ą¤ąŠą╝ąĖą╝ąŠ čŹč鹊ą│ąŠ ąĮą░ čüčéą░ą▒ąĖą╗čīąĮąŠčüčéčī ąĮčāą╗čÅ ą│ąĖčĆąŠčüą║ąŠą┐ą░ ą▓ą╗ąĖčÅąĄčé č鹥ą╝ą┐ąĄčĆą░čéčāčĆą░ ą┤ą░čéčćąĖą║ą░, ą║ąŠč鹊čĆčāčÄ čéčĆąĄą▒čāąĄčéčüčÅ ą║ąŠąĮčéčĆąŠą╗ąĖčĆąŠą▓ą░čéčī. ąØą░ą║ąŠąĮąĄčå, čéčĆąĄčéčīąĖą╝ ąĖčüč鹊čćąĮąĖą║ąŠą╝ ąŠčłąĖą▒ąŠą║ čÅą▓ą╗čÅąĄčéčüčÅ ą┐ą░čĆą░ąĘąĖčéąĮą░čÅ čćčāą▓čüčéą▓ąĖč鹥ą╗čīąĮąŠčüčéčī ą║ ą╗ąĖąĮąĄą╣ąĮąŠą╝čā čāčüą║ąŠčĆąĄąĮąĖčÄ, ą║ąŠč鹊čĆą░čÅ ąĮąĄąŠą┤ąĖąĮą░ą║ąŠą▓ą░ ą┤ą╗čÅ čĆą░ąĘąĮčŗčģ ąŠčüąĄą╣.
ąŚą░ ą▓čĆąĄą╝čÅ ąŠčé čüčéą░čĆčéą░ ą┤ąŠ ą║ąŠčĆčĆąĄą║čåąĖąĖ ą┐ąŠ čüąŠą╗ąĮąĄčćąĮąŠą╝čā ą┤ą░čéčćąĖą║čā (ąĮąŠą╝ąĖąĮą░ą╗čīąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ 300 čüąĄą║.) ą┐čĆąĖ čģąŠčĆąŠčłąĄą╣ ą║ąŠą╝ą┐ąĄąĮčüą░čåąĖąĖ ą┐ą░čĆą░ąĘąĖčéąĮčŗčģ čŹčäč乥ą║č鹊ą▓ čāčģąŠą┤ ą╝ąŠąČąĄčé čüąŠčüčéą░ą▓ąĖčéčī ąŠą║ąŠą╗ąŠ 2 ą│čĆą░ą┤.
ąöą░čéčćąĖą║ ADIS16251, čüč鹊čÅčēąĖą╣ ą▓ ą║ą░ąĮą░ą╗ąĄ čĆčŗčüą║ą░ąĮąĖčÅ, ąŠą▒ą╗ą░ą┤ą░ąĄčé ą┐ąŠčģąŠąČąĖą╝ ąĮą░ą▒ąŠčĆąŠą╝ čüą▓ąŠą╣čüčéą▓, ąĮąŠ ąŠčéąĮąŠčüąĖčéčüčÅ ą║ ą┐čĆąĄą┤čŗą┤čāčēąĄą╝čā ą┐ąŠą║ąŠą╗ąĄąĮąĖčÄ, ąĖąĘ-ąĘą░ č湥ą│ąŠ ąĄą│ąŠ ąĘą░čÅą▓ą╗ąĄąĮąĮą░čÅ čüčéą░ą▒ąĖą╗čīąĮąŠčüčéčī ą┐čĆąĖą╝ąĄčĆąĮąŠ ą▓ą┤ą▓ąŠąĄ čģčāąČąĄ.
ąŻą┐čĆą░ą▓ą╗čÅčÄčēą░čÅ ą┐čĆąŠą│čĆą░ą╝ą╝ą░ ą▒čŗą╗ą░ ąĮą░ą┐ąĖčüą░ąĮą░ ąĮą░ ą░čüčüąĄą╝ą▒ą╗ąĄčĆąĄ AVR8, ą░ ą▓čŗą┐ąŠą╗ąĮčÅčéčī čüą╗ąŠąČąĮčŗąĄ ą╝ą░č鹥ą╝ą░čéąĖč湥čüą║ąĖąĄ ą▓čŗčćąĖčüą╗ąĄąĮąĖčÅ ąĮą░ ą░čüčüąĄą╝ą▒ą╗ąĄčĆąĄ ąĮąĄčāą┤ąŠą▒ąĮąŠ. ą¤ąŠčŹč鹊ą╝čā ą┤ą╗čÅ ą▓ąĮčāčéčĆąĄąĮąĮąĖčģ ą▓čŗčćąĖčüą╗ąĄąĮąĖą╣ ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ čāą┐čĆąŠčēąĄąĮąĮčŗąĄ č乊čĆą╝čāą╗čŗ ąĖ ą░ą╗ą│ąŠčĆąĖčéą╝čŗ. ąÆ čüą╗čāčćą░ąĄ čćąĖčüą╗ąĄąĮąĮąŠą│ąŠ ąĖąĮč鹥ą│čĆąĖčĆąŠą▓ą░ąĮąĖčÅ čŹč鹊 ą┐čĆąĖą▓ąŠą┤ąĖčé ą║ ą┐ąŠč鹥čĆąĄ č鹊čćąĮąŠčüčéąĖ, ąŠą┤ąĮą░ą║ąŠ č鹊čćąĮąŠčüčéčī čüą░ą╝ąŠą│ąŠ ą┤ą░čéčćąĖą║ą░ ą╗ąĖą╝ąĖčéąĖčĆčāąĄčé č鹊čćąĮąŠčüčéčī ą┐ąŠą╗čāčćą░ąĄą╝čŗčģ čĆąĄąĘčāą╗čīčéą░č鹊ą▓ ą┤ą░ąČąĄ čüąĖą╗čīąĮąĄąĄ. ą¤ąŠčŹč鹊ą╝čā čćąĖčüą╗ąĄąĮąĮąŠąĄ ąĖąĮč鹥ą│čĆąĖčĆąŠą▓ą░ąĮąĖąĄ čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮąŠ ą▓ ą┐čĆąŠčüč鹥ą╣čłąĄą╝ ą▓ąĖą┤ąĄ, ą╝ąĄč鹊ą┤ąŠą╝ ą┐čĆčÅą╝ąŠčāą│ąŠą╗čīąĮąĖą║ąŠą▓ [5], čćč鹊 ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ąŠą▒ąŠą╣čéąĖčüčī ą▒ąĄąĘ čāą╝ąĮąŠąČąĄąĮąĖčÅ ą▒ą╗ą░ą│ąŠą┤ą░čĆčÅ čāą┤ą░čćąĮąŠ ą▓čŗą▒čĆą░ąĮąĮąŠą╝čā ą▓ąĄčüčā ą╝ą╗ą░ą┤čłąĄą│ąŠ čĆą░ąĘčĆčÅą┤ą░ ąĖ ą▓čĆąĄą╝ąĄąĮąĮąŠą│ąŠ ą║ą▓ą░ąĮčéą░. ą¦ą░čüč鹊čéą░ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ ADIS16300 čĆą░ą▓ąĮą░ 819,2 ąōčå, ą▓ąĄčü ąĄą┤ąĖąĮąĖčåčŗ ą╝ą╗ą░ą┤čłąĄą│ąŠ čĆą░ąĘčĆčÅą┤ą░ čüąŠčüčéą░ą▓ą╗čÅąĄčé 1/80 ą│čĆą░ą┤. čāą│ą╗ą░ ą▓ čüąĄą║.: 1/819,2*1/80=1/65536.
ą¤čĆąĖ čéą░ą║ąĖčģ čćą░čüč鹊č鹥 ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ ąĖ ą▓ąĄčüąĄ ą╝ą╗ą░ą┤čłąĄą│ąŠ čĆą░ąĘčĆčÅą┤ą░ ą╝ąĄč鹊ą┤ ą┐čĆčÅą╝ąŠčāą│ąŠą╗čīąĮąĖą║ąŠą▓ ą┤ą░ąĄčé ą┤ąŠčüčéą░č鹊čćąĮčāčÄ č鹊čćąĮąŠčüčéčī. ąøąĄą│ą║ąŠ ąŠą┐čĆąĄą┤ąĄą╗ąĖčéčī, čćč鹊 ąĮą░ čĆą░ąĘą▓ąŠčĆąŠč鹥 ąŠčé 90 ą┤ąŠ 0 ą│čĆą░ą┤. ąĘą░ 180 čüąĄą║. ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮą░čÅ ąŠčłąĖą▒ą║ą░ ąĮąĄ ą┐čĆąĄą▓čŗčüąĖčé 1,125 ą│čĆą░ą┤.
ąöą╗čÅ ą┐čĆąĄą┤ą▓ą░čĆąĖč鹥ą╗čīąĮąŠą│ąŠ ą░ąĮą░ą╗ąĖąĘą░ č鹊čćąĮąŠčüčéąĖ MEMS-ą┤ą░čéčćąĖą║ąŠą▓ čåąĄą╗ąĄčüąŠąŠą▒čĆą░ąĘąĮąŠ ą┐čĆąĖą╝ąĄąĮąĖčéčī ą┐čĆąŠčüč鹥ą╣čłčāčÄ ą╝ąŠą┤ąĄą╗čī, ą║ąŠč鹊čĆą░čÅ ąĮąĄ ą▒čāą┤ąĄčé ą▓ą║ą╗čÄčćą░čéčī čāą│ąŠą╗ ą║čĆąĄąĮą░, ą░ č鹊ą╗čīą║ąŠ čāą│ą╗čŗ čĆčŗčüą║ą░ąĮąĖčÅ ąĖ čéą░ąĮą│ą░ąČą░. ąŻč湥čé ąŠčłąĖą▒ą║ąĖ, ą▓ąĮąŠčüąĖą╝čŗą╣ ą┤čĆąĄą╣č乊ą╝ ą┐ąŠ ą║čĆąĄąĮčā, ą┤ąŠą▓ąŠą╗čīąĮąŠ čüą╗ąŠąČąĄąĮ ąĖ ąĮą░ ą┤ą░ąĮąĮąŠą╝ čŹčéą░ą┐ąĄ ąĮąĄčåąĄą╗ąĄčüąŠąŠą▒čĆą░ąĘąĄąĮ.
ą¤ąŠ ą░ąĮą░ą╗ąŠą│ąĖčćąĮčŗą╝ ą┐čĆąĖčćąĖąĮą░ą╝ ą┐čĆąĖčłą╗ąŠčüčī ąŠčéą║ą░ąĘą░čéčīčüčÅ ąĖ ąŠčé ą╝ąŠą┤ąĄą╗ąĖčĆąŠą▓ą░ąĮąĖčÅ č鹥čĆą╝ąĖąĮą░ą╗čīąĮąŠą│ąŠ ąĮą░ą▓ąĄą┤ąĄąĮąĖčÅ, ą▒ąŠą╗ąĄąĄ čåąĄą╗ąĄčüąŠąŠą▒čĆą░ąĘąĮčŗą╝ ą┤ą╗čÅ "ąĮčāą╗ąĄą▓ąŠą│ąŠ" ą┐čĆąĖą▒ą╗ąĖąČąĄąĮąĖčÅ ą▓čŗą│ą╗čÅą┤ąĖčé ąČąĄčüčéą║ąĖą╣ ąĘą░ą║ąŠąĮ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ. ą¤ąŠčüą║ąŠą╗čīą║čā ą▓ąĄčĆčģąĮąĖąĄ čüčéčāą┐ąĄąĮąĖ ą╝ąŠą┤ąĄą╗ąĖčĆčāąĄą╝ąŠą╣ čĆą░ą║ąĄčéčŗ ąĖčüą┐ąŠą╗čīąĘčāčÄčé ąĀąöąóąó, ą┐čĆąĖčłą╗ąŠčüčī ąŠčéą║ą░ąĘą░čéčīčüčÅ ąĖ ąŠčé čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą║ą░ąČčāčēąĄą╣čüčÅ čüą║ąŠčĆąŠčüčéčīčÄ.
ąØą░ ąĖčüč鹊čĆąĖč湥čüą║ąĖčģ ą┐čĆąĖą╝ąĄčĆą░čģ [6] ąĖąĘą▓ąĄčüčéąĮąŠ, čćč鹊 ą┐ąĄčĆą▓čŗąĄ čāą┐čĆą░ą▓ą╗čÅąĄą╝čŗąĄ ą▒ą░ą╗ą╗ąĖčüčéąĖč湥čüą║ąĖąĄ čĆą░ą║ąĄčéčŗ ąĮąĄ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ą╗ąĖ čüąĖčüč鹥ą╝čā čüčéą░ą▒ąĖą╗ąĖąĘą░čåąĖąĖ čåąĄąĮčéčĆą░ ą╝ą░čüčü ąĖ čüąĖčüč鹥ą╝čā ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠą│ąŠ ąŠą┐ąŠčĆąŠąČąĮąĄąĮąĖčÅ ą▒ą░ą║ąŠą▓. ąŁč鹊 ą┐čĆąĖą▓ąŠą┤ąĖčé ą║ ą┐ąŠč鹥čĆčÅą╝ ą▓ ą┤ą░ą╗čīąĮąŠčüčéąĖ ąĖ č鹊čćąĮąŠčüčéąĖ, ąŠą┤ąĮą░ą║ąŠ čüčĆą░ą▓ąĮąĖą╝čŗąĄ ą┐ąŠč鹥čĆąĖ ą┐čĆąĖą▓ąĮąŠčüąĖčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ ą┐čĆąŠčüč鹥ą╣čłąĄą╣ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ čāą│ą╗ą░ čéą░ąĮą│ą░ąČą░.
ą¤ąŠčŹč鹊ą╝čā ąĮą░ ą┤ą░ąĮąĮąŠą╝ čŹčéą░ą┐ąĄ čåąĄą╗ąĄčüąŠąŠą▒čĆą░ąĘąĮąŠ ąŠą│čĆą░ąĮąĖčćąĖčéčīčüčÅ ą╝ąŠą┤ąĄą╗čīčÄ "ą┐ą╗ąŠčüą║ąŠą╣" ąŚąĄą╝ą╗ąĖ (čé.ąĄ. čåąĄą╗ąĄą▓ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ čāą│ą╗ą░ čéą░ąĮą│ą░ąČą░ ą▓ ą║ąŠąĮčåąĄ čéčĆą░ąĄą║č鹊čĆąĖąĖ ą┐čĆąĖąĮąĖą╝ą░ąĄčéčüčÅ čĆą░ą▓ąĮčŗą╝ ąĮčāą╗čÄ), ąĮąĄ čāčćąĖčéčŗą▓ą░čéčī ąĮąĄčåąĄąĮčéčĆą░ą╗čīąĮąŠčüčéčī ą│čĆą░ą▓ąĖčéą░čåąĖąŠąĮąĮąŠą│ąŠ ą┐ąŠą╗čÅ. ąöą╗čÅ ą╝ąŠą┤ąĄą╗ąĖčĆąŠą▓ą░ąĮąĖčÅ ą▓čŗą▓ąŠą┤ą░ ąĮą░ ąŠčĆą▒ąĖčéčā ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ čüą┐čĆąĄą┤čłąĖčé Launchmodel [7], ąĮą░ą┐ąĖčüą░ąĮąĮčŗą╣ ąÜąĖčĆąĖą╗ą╗ąŠą╝ ąøąĄą▓ąĖąĮčŗą╝ ą┤ą╗čÅ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ Microsoft Excel, ą║ą░ą║ ą┐čĆąŠčüč鹊ą╣ ą▓ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĖ ąĖ ą┤ąŠčüčéą░č鹊čćąĮąŠ č鹊čćąĮčŗą╣ čĆą░čüč湥čéąĮčŗą╣ ąĖąĮčüčéčĆčāą╝ąĄąĮčé.
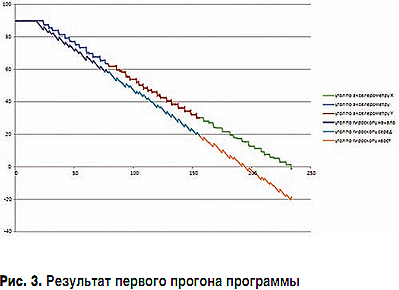
ą¤čĆąĖ ą┐čĆąŠą▓ąĄčĆą║ąĄ čĆą░ą▒ąŠčéčŗ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ čāą│ą╗ą░ čéą░ąĮą│ą░ąČą░ ą▒čŗą╗ąŠ ąŠą▒ąĮą░čĆčāąČąĄąĮąŠ ąĘąĮą░čćąĖč鹥ą╗čīąĮąŠąĄ čüąĖčüč鹥ą╝ą░čéąĖč湥čüą║ąŠąĄ čĆą░čüčģąŠąČą┤ąĄąĮąĖąĄ ą╝ąĄąČą┤čā čāą│ą╗ąŠą╝ čéą░ąĮą│ą░ąČą░, ąĖąĘą╝ąĄčĆąĄąĮąĮčŗą╝ čü ą┐ąŠą╝ąŠčēčīčÄ ą░ą║čüąĄą╗ąĄčĆąŠą╝ąĄčéčĆą░-ąĖąĮą║ą╗ąĖąĮąŠą╝ąĄčéčĆą░, ą▓čģąŠą┤čÅčēąĄą│ąŠ ą▓ čüąŠčüčéą░ą▓ ADIS16300, ąĖ ą▓čŗčćąĖčüą╗ąĄąĮąĮąŠą│ąŠ ąĖąĮč鹥ą│čĆąĖčĆąŠą▓ą░ąĮąĖąĄą╝ ą┐ąŠ ą┤ą░ąĮąĮčŗą╝ ą│ąĖčĆąŠčüą║ąŠą┐ą░, ą┤ąŠčüčéąĖą│ą░ą▓čłąĄąĄ 20 ą│čĆą░ą┤. (čüą╝. čĆąĖčü. 3). ą¤ąŠ ąŠčüąĖ ą░ą▒čüčåąĖčüčü ŌĆō ą▓čĆąĄą╝čÅ ą▓ čüąĄą║., ą┐ąŠ ą▓ąĄčĆčéąĖą║ą░ą╗čīąĮąŠą╣ ąŠčüąĖ ŌĆō čāą│ąŠą╗ čéą░ąĮą│ą░ąČą░ ą▓ ą│čĆą░ą┤.
ąĪčéčāą┐ąĄąĮčīą║ąĖ, ą┐ąŠą║ą░ąĘčŗą▓ą░čÄčēąĖąĄ, čćč鹊 ą│ąŠą╗ąŠą▓ą║ą░ ą┤ą▓ąĖą│ą░ą╗ą░čüčī čĆčŗą▓ą║ą░ą╝ąĖ, ą▓ąŠąĘąĮąĖą║ą╗ąĖ ąĖąĘ-ąĘą░ ą╝ąĄčĆčéą▓ąŠą╣ ąĘąŠąĮčŗ 菹╗ąĄą║čéčĆąŠą┐čĆąĖą▓ąŠą┤ąŠą▓. ąöą╗čÅ ą▒ąŠčĆčīą▒čŗ čü ą╝ąĄčĆčéą▓ąŠą╣ ąĘąŠąĮąŠą╣ ą┐čĆąŠą│čĆą░ą╝ą╝ą░ ą▒čŗą╗ą░ ą╝ąŠą┤ąĖčäąĖčåąĖčĆąŠą▓ą░ąĮą░. ąæčŗą╗ąŠ ą▓ą▓ąĄą┤ąĄąĮąŠ čüą╗ą░ą│ą░ąĄą╝ąŠąĄ ą┤ą╗čÅ ą║ąŠą╝ą┐ąĄąĮčüą░čåąĖąĖ ą╝ąĄčĆčéą▓ąŠą╣ ąĘąŠąĮčŗ. ąóą░ą║ąŠąĄ čüą╗ą░ą│ą░ąĄą╝ąŠąĄ ą┐čĆąĖą▓ąĄą╗ąŠ ą║ ą░ą▓č鹊ą║ąŠą╗ąĄą▒ą░ąĮąĖčÅą╝ ą░ą╝ą┐ą╗ąĖčéčāą┤ąŠą╣ ąŠą║ąŠą╗ąŠ 1/8ŌĆō3/16 ą│čĆą░ą┤. ą¤čĆąĖ ąĖčģ ą▓ąŠąĘąĮąĖą║ąĮąŠą▓ąĄąĮąĖąĖ čéčĆąĄąĮąĖąĄ ą┐ąŠą║ąŠčÅ ąĮąĄ čüą║ą░ąĘčŗą▓ą░ąĄčéčüčÅ ąĖ ąĮąĄ ą▓ą╗ąĖčÅąĄčé ąĮą░ č鹊čćąĮąŠčüčéčī ąŠčéčĆą░ą▒ąŠčéą║ąĖ. ąśąĮč鹥čĆąĄčüąĮąŠ, čćč鹊 čéčĆąĄąĮąĖąĄ ą┐ąŠą║ąŠčÅ ą▓ ą┐ąŠą┤čłąĖą┐ąĮąĖą║ą░čģ čüąŠąĘą┤ą░ą▓ą░ą╗ąŠ ą┐čĆąŠą▒ą╗ąĄą╝čŗ ąĖ ą┐čĆąĖ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĖ čéčĆą░ą┤ąĖčåąĖąŠąĮąĮčŗčģ ą╝ąĄčģą░ąĮąĖč湥čüą║ąĖčģ ą│ąĖčĆąŠčüą║ąŠą┐ąŠą▓, ąŠą┤ąĮąĖą╝ ąĖąĘ čĆąĄčłąĄąĮąĖą╣ ą▒čŗą╗ąŠ ą▓ąĖą▒čĆą░čåąĖąŠąĮąĮąŠąĄ ą▓čĆą░čēąĄąĮąĖąĄ čüąĄą┐ą░čĆą░č鹊čĆą░ ą▓ čłą░čĆąĖą║ąŠą┐ąŠą┤čłąĖą┐ąĮąĖą║ą░čģ.
MEMS-ą┤ą░čéčćąĖą║ąĖ čāą│ą╗ąŠą▓ąŠą╣ čüą║ąŠčĆąŠčüčéąĖ ą┤ąĄą╝ąŠąĮčüčéčĆąĖčĆčāčÄčé ą┤čĆąĄą╣čä ąĮčāą╗čÅ ąĖąĘ-ąĘą░ ą║ąŠą╗ąĄą▒ą░ąĮąĖą╣ č鹥ą╝ą┐ąĄčĆą░čéčāčĆčŗ. ą¤čĆąĖ ą▓ą║ą╗čÄč湥ąĮąĖąĖ ą┤ą░čéčćąĖą║ą░ ąĮą░čćąĖąĮą░ąĄčéčüčÅ ąĄą│ąŠ čĆą░ąĘąŠą│čĆąĄą▓ ąĖąĘ-ąĘą░ čüąŠą▒čüčéą▓ąĄąĮąĮąŠą│ąŠ č鹥ą┐ą╗ąŠą▓čŗą┤ąĄą╗ąĄąĮąĖčÅ, ą┐čĆąĖ čŹč鹊ą╝ ą┐čĆąŠąĖčüčģąŠą┤ąĖčé čāčģąŠą┤ ąĮčāą╗čÅ čāą│ą╗ąŠą▓ąŠą╣ čüą║ąŠčĆąŠčüčéąĖ. ąöą╗čÅ ą╝ą░ą╗čŗčģ čüą║ąŠčĆąŠčüč鹥ą╣ ąĖąĘą╝ąĄąĮąĄąĮąĖčÅ č鹥ą╝ą┐ąĄčĆą░čéčāčĆčŗ čāčģąŠą┤ ą┐čĆąĖą╝ąĄčĆąĮąŠ ą┐čĆąŠą┐ąŠčĆčåąĖąŠąĮą░ą╗ąĄąĮ č鹥ą╝ą┐ąĄčĆą░čéčāčĆąĄ, ą┐čĆąĖ čĆąĄąĘą║ąĖčģ ąĖąĘą╝ąĄąĮąĄąĮąĖčÅčģ č鹥ą╝ą┐ąĄčĆą░čéčāčĆčŗ čŹčéą░ ą┐čĆąŠą┐ąŠčĆčåąĖąŠąĮą░ą╗čīąĮąŠčüčéčī ąĮą░čĆčāčłą░ąĄčéčüčÅ. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, ą┐čĆąĖ 菹║čüą┐ą╗čāą░čéą░čåąĖąĖ ą┤ą░čéčćąĖą║ą░ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠ ąĖąĘą▒ąĄą│ą░čéčī ą▒čŗčüčéčĆčŗčģ ąĖąĘą╝ąĄąĮąĄąĮąĖą╣ č鹥ą╝ą┐ąĄčĆą░čéčāčĆčŗ.
ą¤ąŠčüč鹊čÅąĮąĮą░čÅ ą▓čĆąĄą╝ąĄąĮąĖ ą┐čĆąŠą│čĆąĄą▓ą░ ą│ąĖčĆąŠčüą║ąŠą┐ą░ ą▓ čüą┐ąŠą║ąŠą╣ąĮąŠą╝ ą▓ąŠąĘą┤čāčģąĄ ą▒čŗą╗ą░ 菹║čüą┐ąĄčĆąĖą╝ąĄąĮčéą░ą╗čīąĮąŠ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮą░ ąĖ čüąŠčüčéą░ą▓ąĖą╗ą░ ąŠą║ąŠą╗ąŠ 12 ą╝ąĖąĮčāčé. ą×ą▒čŗčćąĮąŠ čéčĆąĄą▒ąŠą▓ą░ą╗ąŠčüčī ąĮąĄ ą╝ąĄąĮąĄąĄ 18 ą╝ąĖąĮčāčé ąŠčé ą┐ąĄčĆą▓ąŠą│ąŠ ą▓ą║ą╗čÄč湥ąĮąĖčÅ ą┤ąŠ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ ąĮčāą╗čÅ.
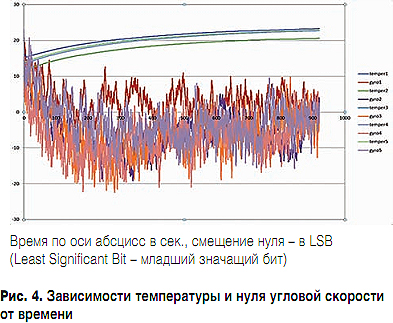
ąÜąŠčĆčĆąĄą║čåąĖčÅ ą╝ąĄą┤ą╗ąĄąĮąĮčŗčģ ąĖąĘą╝ąĄąĮąĄąĮąĖą╣ č鹥ą╝ą┐ąĄčĆą░čéčāčĆčŗ ą▒čŗą╗ą░ čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮą░, ąĮąŠ, ą┐ąŠčüą║ąŠą╗čīą║čā ą┐čĆąĖ ą▒čŗčüčéčĆčŗčģ ąĖąĘą╝ąĄąĮąĄąĮąĖčÅčģ ąŠąĮą░ ąĮąĄ čĆą░ą▒ąŠčéą░ąĄčé, ą▓čüąĄ čĆą░ą▓ąĮąŠ čéčĆąĄą▒čāąĄčéčüčÅ ą┐ąŠą┤ąŠąČą┤ą░čéčī 15 ą╝ąĖąĮčāčé ą┤ąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ą┤ą░čéčćąĖą║ą░. ąØą░ ą┐čĆąĖą▓ąĄą┤ąĄąĮąĮąŠą╝ ą│čĆą░čäąĖą║ąĄ (čüą╝. čĆąĖčü. 4) ą║ąŠčĆčĆąĄą║čåąĖčÅ ą╝ąĄą┤ą╗ąĄąĮąĮčŗčģ ąĖąĘą╝ąĄąĮąĄąĮąĖą╣ čāąČąĄ ą▓ą║ą╗čÄč湥ąĮą░, ąĮąŠ ą▓ąĖą┤ąĮąŠ, čćč鹊 ąĄąĄ ą▓ą╗ąĖčÅąĮąĖąĄ ą▓ ą┐ąĄčĆą▓čŗąĄ 5 ą╝ąĖąĮčāčé čĆą░ą▒ąŠčéčŗ ąĮąĄą┤ąŠčüčéą░č鹊čćąĮąŠ.
ąØąĄčüą╝ąŠčéčĆčÅ ąĮą░ č鹊, čćč鹊 MEMS-ą│ąĖčĆąŠčüą║ąŠą┐ čÅą▓ą╗čÅąĄčéčüčÅ ą┤ą░čéčćąĖą║ąŠą╝ čāą│ą╗ąŠą▓ąŠą╣ čüą║ąŠčĆąŠčüčéąĖ, čā ąĮąĄą│ąŠ ąĄčüčéčī ą┐ą░čĆą░ąĘąĖčéąĮą░čÅ čćčāą▓čüčéą▓ąĖč鹥ą╗čīąĮąŠčüčéčī ą║ ą╗ąĖąĮąĄą╣ąĮąŠą╝čā čāčüą║ąŠčĆąĄąĮąĖčÄ. ąŻčüą║ąŠčĆąĄąĮąĖąĄ, ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĮąŠąĄ ą▓ą┤ąŠą╗čī ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮąŠą╣ ąŠčüąĖ ą│ąĖčĆąŠčüą║ąŠą┐ą░, ą▓čŗąĘčŗą▓ą░ąĄčé čüą╝ąĄčēąĄąĮąĖąĄ ąĮčāą╗čÅ, ą░ ą┐čĆąĖ ąĖąĮč鹥ą│čĆąĖčĆąŠą▓ą░ąĮąĖąĖ ŌĆō čäą░ąĮč鹊ą╝ąĮčŗą╣ ą┐ąŠą▓ąŠčĆąŠčé, čćč鹊 ąĖ ą▒čŗą╗ąŠ ą┐čĆąĖčćąĖąĮąŠą╣ čĆą░čüčģąŠąČą┤ąĄąĮąĖčÅ, ą┐ąŠą║ą░ąĘą░ąĮąĮąŠą│ąŠ ąĮą░ čĆąĖčü. 4. "ąĪčéčāą┐ąĄąĮčīą║ąĖ" ąĮą░ ą│čĆą░čäąĖą║ąĄ ąĘą░čéčĆčāą┤ąĮąĖą╗ąĖ ą┐čĆą░ą▓ąĖą╗čīąĮčāčÄ ąĖąĮč鹥čĆą┐čĆąĄčéą░čåąĖčÄ čÅą▓ą╗ąĄąĮąĖčÅ.
ąÆ čäąĖčĆą╝ąĄąĮąĮąŠą╝ čüą┐čĆą░ą▓ąŠčćąĮąŠą╝ ą╗ąĖčüč鹥 ąĮą░ ą╝ąĖą║čĆąŠčüčģąĄą╝čā ADIS16300[4] čćčāą▓čüčéą▓ąĖč鹥ą╗čīąĮąŠčüčéčī ą║ ą╗ąĖąĮąĄą╣ąĮąŠą╝čā čāčüą║ąŠčĆąĄąĮąĖčÄ čāą║ą░ąĘą░ąĮą░ ąŠą┤ąĖąĮą░ą║ąŠą▓ąŠą╣ ą┤ą╗čÅ ą▓čüąĄčģ ąŠčüąĄą╣, čćč鹊 ąĮąĄ čüąŠąŠčéą▓ąĄčéčüčéą▓čāąĄčé ąĖčüčéąĖąĮąĄ, ą┐ąŠčŹč鹊ą╝čā ą┐čĆąĖčłą╗ąŠčüčī 菹║čüą┐ąĄčĆąĖą╝ąĄąĮčéą░ą╗čīąĮąŠ ą▓čŗčÅčüąĮąĖčéčī čģą░čĆą░ą║č鹥čĆ čŹč鹊ą╣ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ. ą×ą║ą░ąĘą░ą╗ąŠčüčī, čćč鹊 ąĖ čā ADIS16300, ąĖ čā ADIS16251 čćčāą▓čüčéą▓ąĖč鹥ą╗čīąĮąŠčüčéčī ą┤ą░čéčćąĖą║ą░ čāą│ą╗ąŠą▓ąŠą╣ čüą║ąŠčĆąŠčüčéąĖ ą║ ą╗ąĖąĮąĄą╣ąĮąŠą╝čā čāčüą║ąŠčĆąĄąĮąĖčÄ ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮą░ ą▓ą┤ąŠą╗čī ąŠčüąĖ Y ąĖ ą┐čĆą░ą║čéąĖč湥čüą║ąĖ ąŠčéčüčāčéčüčéą▓čāąĄčé ą▓ą┤ąŠą╗čī ąŠčüąĖ X. ą¤ąŠ ąŠčüąĖ Z, čÅą▓ą╗čÅčÄčēąĄą╣čüčÅ ąŠčüčīčÄ ąĖąĘą╝ąĄčĆąĄąĮąĖčÅ čāą│ą╗ąŠą▓ąŠą╣ čüą║ąŠčĆąŠčüčéąĖ, ąŠąĮą░ ą┐čĆąŠą╝ąĄąČčāč鹊čćąĮą░čÅ. ąÜą░ą║ čüą╗ąĄą┤čüčéą▓ąĖąĄ, ąĄčüą╗ąĖ ą│ąĖčĆąŠčüą║ąŠą┐ čāčüčéą░ąĮąŠą▓ąĖčéčī ą▓ čĆą░ą║ąĄč鹥 čéą░ą║, čćč鹊ą▒čŗ ą┐čĆąŠą┤ąŠą╗čīąĮąŠąĄ čāčüą║ąŠčĆąĄąĮąĖąĄ ą▒čŗą╗ąŠ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąŠ ą▓ą┤ąŠą╗čī ąŠčüąĖ X, č鹊 ąĮąŠčĆą╝ą░ą╗čīąĮčŗą╣ ą┐ąŠą╗ąĄčé čĆą░ą║ąĄčéčŗ ąĮąĄ ą▒čāą┤ąĄčé čüą║ą░ąĘčŗą▓ą░čéčīčüčÅ ąĮą░ ą┐ąŠą║ą░ąĘą░ąĮąĖčÅčģ ą│ąĖčĆąŠčüą║ąŠą┐ą░, ąĖ ą▓ą╗ąĖčÅąĮąĖąĄ ą┐ą░čĆą░ąĘąĖčéąĮąŠą╣ čćčāą▓čüčéą▓ąĖč鹥ą╗čīąĮąŠčüčéąĖ ą▒čāą┤ąĄčé ąĮąĄą▓ąĄą╗ąĖą║ąŠ. ąÆ ą╝ąŠą┤ąĄą╗čīąĮąŠą╣ čāčüčéą░ąĮąŠą▓ą║ąĄ ą▓ ąĮą░čćą░ą╗ąĄ čĆą░ąĘą▓ąŠčĆąŠčéą░ ą┐ąŠ čéą░ąĮą│ą░ąČčā ą│ąĖčĆąŠčüą║ąŠą┐ ąĘą░ąĮąĖą╝ą░ąĄčé ąĮą░ąĖą▓čŗą│ąŠą┤ąĮąĄą╣čłąĄąĄ ą┐ąŠą╗ąŠąČąĄąĮąĖąĄ, ą┐čĆąĖ ą║ąŠč鹊čĆąŠą╝ ą▓ą╗ąĖčÅąĮąĖąĄ čāčüą║ąŠčĆąĄąĮąĖčÅ čüą▓ąŠą▒ąŠą┤ąĮąŠą│ąŠ ą┐ą░ą┤ąĄąĮąĖčÅ ą╝ąĖąĮąĖą╝ą░ą╗čīąĮąŠ. ą¤ąŠ ą╝ąĄčĆąĄ ą┐ąŠą▓ąŠčĆąŠčéą░ ą┐čĆąŠąĄą║čåąĖčÅ ą▓ąĄą║č鹊čĆą░ g ąĮą░ ąŠčüčī Y čāą▓ąĄą╗ąĖčćąĖą▓ą░ąĄčéčüčÅ, ąĖ ą┐ąŠ ą╝ąĄčĆąĄ čāą▓ąĄą╗ąĖč湥ąĮąĖčÅ ąĮąŠą╗čī čāą│ą╗ąŠą▓ąŠą╣ čüą║ąŠčĆąŠčüčéąĖ ą│ąĖčĆąŠčüą║ąŠą┐ą░ čüą╝ąĄčēą░ąĄčéčüčÅ. ąŁč鹊 ą▓ąŠčüą┐čĆąĖąĮąĖą╝ą░ąĄčéčüčÅ ą║ą░ą║ ąĖąĘą╝ąĄąĮąĄąĮąĖąĄ čāą│ą╗ąŠą▓ąŠą╣ čüą║ąŠčĆąŠčüčéąĖ. ąÆ čĆąĄąĘčāą╗čīčéą░č鹥 ą┐čĆąĖ ą┐ąŠčüč鹊čÅąĮąĮąŠą╣, ą┐ąŠ ą┤ą░ąĮąĮčŗą╝ ą│ąĖčĆąŠčüą║ąŠą┐ą░, čāą│ą╗ąŠą▓ąŠą╣ čüą║ąŠčĆąŠčüčéąĖ ą┐čĆąŠąĖčüčģąŠą┤ąĖčé čäą░ą║čéąĖč湥čüą║ąŠąĄ ąĘą░ą╝ąĄą┤ą╗ąĄąĮąĖąĄ ą┐ąŠą▓ąŠčĆąŠčéą░.
ąØąĄčüą╝ąŠčéčĆčÅ ąĮą░ č鹊, čćč鹊 čŹč鹊 čÅą▓ą╗ąĄąĮąĖąĄ ąĮąĄ ą▒čāą┤ąĄčé ąĖą╝ąĄčéčī ą╝ąĄčüčéą░ ąĮą░ ą▒ąŠčĆčéčā čĆą░ą║ąĄčéčŗ, čé.ą║. čéą░ą╝ ąŠčéą║ą╗ąŠąĮąĄąĮąĖąĄ ą▓ąĄą║č鹊čĆą░ čāčüą║ąŠčĆąĄąĮąĖčÅ ąŠčé ą┐čĆąŠą┤ąŠą╗čīąĮąŠą╣ ąŠčüąĖ čĆą░ą║ąĄčéčŗ ąĮąĖčćč鹊ąČąĮąŠ, ą┤ą╗čÅ ąŠčåąĄąĮą║ąĖ č鹊čćąĮąŠčüčéąĮčŗčģ čģą░čĆą░ą║č鹥čĆąĖčüčéąĖą║ ą▓ ą╝ą░ą║ąĄč鹥 ą┐ąŠčéčĆąĄą▒ąŠą▓ą░ą╗ąŠčüčī ą▓ą▓ąĄčüčéąĖ čéą░ą║čāčÄ ą║ąŠčĆčĆąĄą║čåąĖčÄ. ąöą╗čÅ ą╗ąĄčéąĮąŠą╣ čüąĖčüč鹥ą╝čŗ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą║ąŠčĆčĆąĄą║čåąĖčÅ ą▒čāą┤ąĄčé ąĮąĄąŠą▒čģąŠą┤ąĖą╝ą░ ą┤ą╗čÅ ą│ąĖčĆąŠčüą║ąŠą┐ą░, ąĖąĘą╝ąĄčĆčÅčÄčēąĄą│ąŠ čāą│ą╗ąŠą▓čāčÄ čüą║ąŠčĆąŠčüčéčī ą┐ąŠ ą║čĆąĄąĮčā, čé.ą║. ąŠąĮ ąĮąĄ ą╝ąŠąČąĄčé ą▒čŗčéčī čüąŠčĆąĖąĄąĮčéąĖčĆąŠą▓ą░ąĮ "ą▓čŗą│ąŠą┤ąĮąŠą╣" ąŠčüčīčÄ X ą▓ą┤ąŠą╗čī ą┐čĆąŠą┤ąŠą╗čīąĮąŠą│ąŠ čāčüą║ąŠčĆąĄąĮąĖčÅ. ą¤ąŠčüą╗ąĄ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ą┐čĆąŠčåąĄą┤čāčĆ ą║ąŠčĆčĆąĄą║čåąĖąĖ ą┐ąŠ č鹥ą╝ą┐ąĄčĆą░čéčāčĆąĄ ąĖ ą┐ąŠ ą╗ąĖąĮąĄą╣ąĮąŠą╝čā čāčüą║ąŠčĆąĄąĮąĖčÄ ą┤ą░ąĮąĮčŗąĄ ą┐čĆąŠą│ąŠąĮąŠą▓ čüčéą░ą╗ąĖ čüąŠąŠčéą▓ąĄčéčüčéą▓ąŠą▓ą░čéčī ąĘą░čÅą▓ą╗ąĄąĮąĮčŗą╝ ą▓ ą┤ą░čéą░čłąĖč鹥 čģą░čĆą░ą║č鹥čĆąĖčüčéąĖą║ą░ą╝ ą│ąĖčĆąŠčüą║ąŠą┐ą░ ą┐ąŠ ą┐ąŠą▓č鹊čĆčÅąĄą╝ąŠčüčéąĖ ąĖ ą▓ą░čĆąĖą░čåąĖąĖ ąÉą╗ą╗ą░ąĮą░.
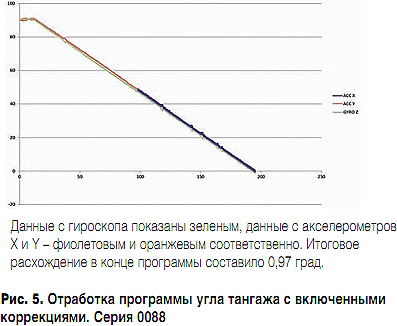
ą¤ąŠ čĆąĄąĘčāą╗čīčéą░čéą░ą╝ 100 ą┐čĆąŠą│ąŠąĮąŠą▓ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąŠ čüčĆąĄą┤ąĮąĄą║ą▓ą░ą┤čĆą░čéąĖčćąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ ąŠčłąĖą▒ą║ąĖ ąĮą░ 190-ą╣ čüąĄą║. ą┐čĆąŠą│čĆą░ą╝ą╝čŗ ą▓ 1,5 ą│čĆą░ą┤. čüąŠ čüčéą░ąĮą┤ą░čĆčéąĮčŗą╝ ąŠčéą║ą╗ąŠąĮąĄąĮąĖąĄą╝ σ = 1,5 ą│čĆą░ą┤. ą¤čĆąĖ čŹč鹊ą╝ 0,25 ąĖąĘ 1,5 ą│čĆą░ą┤. ą╝ąŠą│čāčé ą▒čŗčéčī "čüą┐ąĖčüą░ąĮčŗ" ąĮą░ ąĮąĄą┐ąĄčĆą┐ąĄąĮą┤ąĖą║čāą╗čÅčĆąĮąŠčüčéčī ąŠčüąĄą╣ ą│ąĖčĆąŠčüą║ąŠą┐ą░ ąĖ ą░ą║čüąĄą╗ąĄčĆąŠą╝ąĄčéčĆą░ Y.
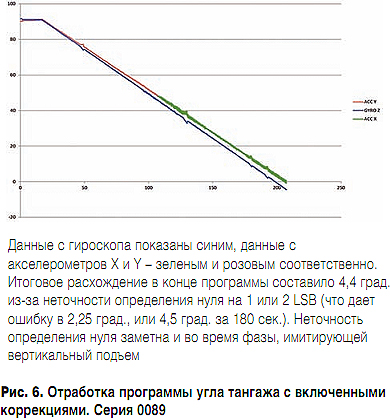
ąØą░ čĆąĖčü. 5 ąĖ 6 ą┐čĆąĄą┤čüčéą░ą▓ą╗ąĄąĮčŗ čéąĖą┐ąĖčćąĮčŗąĄ ą│čĆą░čäąĖą║ąĖ čĆą░ą▒ąŠčéčŗ čāčüčéą░ąĮąŠą▓ą║ąĖ ą┐čĆąĖ ą▓ą║ą╗čÄč湥ąĮąĮčŗčģ ą║ąŠčĆčĆąĄą║čåąĖčÅčģ.
ąöą╗čÅ ą╝ąŠą┤ąĄą╗ąĖčĆąŠą▓ą░ąĮąĖčÅ čäą░ą║čéąĖč湥čüą║ąĖąĄ ą▓ąĄą╗ąĖčćąĖąĮčŗ čāą│ą╗ą░ čéą░ąĮą│ą░ąČą░ ą┐ąŠą┤čüčéą░ą▓ą╗čÅą╗ąĖčüčī ą▓ čüą┐čĆąĄą┤čłąĖčé Launchmodel, ąĖ ą┐ą░čĆą░ą╝ąĄčéčĆčŗ ą┐ąŠą╗čāčćąĖą▓čłąĄą╣čüčÅ ąŠčĆą▒ąĖčéčŗ čüčĆą░ą▓ąĮąĖą▓ą░ą╗ąĖčüčī čü ąĖą┤ąĄą░ą╗čīąĮčŗą╝ąĖ. ą”ąĄą╗ąĄą▓čŗąĄ ąŠčĆą▒ąĖčéčŗ ą▓čŗą▒ąĖčĆą░ą╗ąĖčüčī ąĮąĖąĘą║ąĖą╝ąĖ, čé.ą║. ąĮą░ ąĮąĖčģ ą▒ąŠą╗čīčłąĄ ąĘą░ą╝ąĄčéąĮąŠ ą▓ą╗ąĖčÅąĮąĖąĄ ą░čŹčĆąŠą┤ąĖąĮą░ą╝ąĖč湥čüą║ąĖčģ ą┐ąŠč鹥čĆčī, ą░ ą│čĆčāąĘąŠą┐ąŠą┤čŖąĄą╝ąĮąŠčüčéčī ąĮą░ąĮąŠąĮąŠčüąĖč鹥ą╗čÅ čāą▓ąĄą╗ąĖčćąĖą▓ą░ą╗ą░čüčī.
ą¤čĆąĖčåąĄą╗ąĖą▓ą░ąĮąĖąĄ ą┐ąŠ ąĪąŠą╗ąĮčåčā ą┐ąŠąĘą▓ąŠą╗čÅąĄčé čāą╝ąĄąĮčīčłąĖčéčī ą▓ ąĮąĄčüą║ąŠą╗čīą║ąŠ čĆą░ąĘ čāą│ą╗ąŠą▓čāčÄ ąŠčłąĖą▒ą║čā ą┐ąĄčĆąĄą┤ ąĘą░ą┐čāčüą║ąŠą╝ ą▓ąĄčĆčģąĮąĖčģ čüčéčāą┐ąĄąĮąĄą╣, ąĮąŠ ąĮąĄ ą┐ąŠą│čĆąĄčłąĮąŠčüčéąĖ ą▓ čåąĄą╗ąŠą╝.
ą×ą║ą░ąĘčŗą▓ą░ąĄčéčüčÅ ą▓čŗą│ąŠą┤ąĮčŗą╝ ą┐ąŠčüčéą░ą▓ąĖčéčī ą┤ą╗ąĖč鹥ą╗čīąĮąŠčüčéčī ą▒ą░ą╗ą╗ąĖčüčéąĖč湥čüą║ąŠą╣ ą┐ą░čāąĘčŗ ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéčī ąŠčé čäą░ą║čéąĖč湥čüą║ąŠą╣ čüą║ąŠčĆąŠčüčéąĖ čĆą░ąĘą▓ąŠčĆąŠčéą░ ą┐ąŠ čéą░ąĮą│ą░ąČčā, ą║ąŠč鹊čĆą░čÅ ą╝ąŠąČąĄčé ą▒čŗčéčī ąĖąĘą╝ąĄčĆąĄąĮą░ ą┐ąŠ ą▓čĆąĄą╝ąĄąĮąĖ ą┐čĆąĖčģąŠą┤ą░ ąĪąŠą╗ąĮčåą░ ą▓ ą┐ąŠą╗ąĄ ąĘčĆąĄąĮąĖčÅ čüąŠą╗ąĮąĄčćąĮąŠą│ąŠ ą┤ą░čéčćąĖą║ą░, č鹊ą│ą┤ą░ ą╝ąŠąČąĮąŠ ą┤ąŠą▒ąĖčéčīčüčÅ, čćč鹊ą▒čŗ ą┐ąĄčĆąĖą│ąĄą╣ ą▒čŗą╗ ąĮąĄ ąĮąĖąČąĄ č鹥čĆą╝ąĖąĮą░ą╗čīąĮąŠą╣ č鹊čćą║ąĖ.
ą¤čĆąĖ čŹč鹊ą╝ ą▓čŗčüąŠčéą░ ą░ą┐ąŠą│ąĄčÅ ąĖąĘą╝ąĄąĮčÅąĄčéčüčÅ ąĘąĮą░čćąĖč鹥ą╗čīąĮąŠ ą▒ąŠą╗čīčłąĄ, č湥ą╝ ą▓čŗčüąŠčéą░ ą┐ąĄčĆąĖą│ąĄčÅ, ą┐ąŠčüą║ąŠą╗čīą║čā ą▓ąĄčĆčģąĮąĖąĄ čüčéčāą┐ąĄąĮąĖ ąŠą┐ąĖčüčŗą▓ą░ąĄą╝ąŠą╣ ą╝ąŠą┤ąĄą╗ąĖ ąĮąĄ ąĖą╝ąĄčÄčé ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéąĖ ąŠčéčüąĄčćą║ąĖ ąĖ ą▓čüąĄą│ą┤ą░ čĆą░ą▒ąŠčéą░čÄčé ą┤ąŠ ą┐ąŠą╗ąĮąŠą╣ ą▓čŗčĆą░ą▒ąŠčéą║ąĖ č鹊ą┐ą╗ąĖą▓ą░. ąśąĘą╝ąĄąĮąĄąĮąĖąĄ ą▓čŗčüąŠčéčŗ ą┐ąĄčĆąĖą│ąĄčÅ ąĮą░ 1 ą║ą╝ ą┐čĆąĖą▓ąŠą┤ąĖčé ą║ ąĖąĘą╝ąĄąĮąĄąĮąĖčÄ ą▓čŗčüąŠčéčŗ ą░ą┐ąŠą│ąĄčÅ ąĮą░ 10ŌĆō12 ą║ą╝. ąØą░ čĆąĖčü. 7 ą┐čĆąĖą▓ąĄą┤ąĄąĮą░ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéčī ą▓čŗčüąŠčé ą┐ąĄčĆąĖą│ąĄčÅ ąĖ ą░ą┐ąŠą│ąĄčÅ, ą░ čéą░ą║ąČąĄ ąŠą┐čéąĖą╝ą░ą╗čīąĮąŠą╣ ą┤ą╗ąĖč鹥ą╗čīąĮąŠčüčéąĖ ą▒ą░ą╗ą╗ąĖčüčéąĖč湥čüą║ąŠą╣ ą┐ą░čāąĘčŗ ą┤ą╗čÅ čĆą░čüčüą╝ą░čéčĆąĖą▓ą░ąĄą╝ąŠą╣ ą│ąĖą┐ąŠč鹥čéąĖč湥čüą║ąŠą╣ čĆą░ą║ąĄčéčŗ.
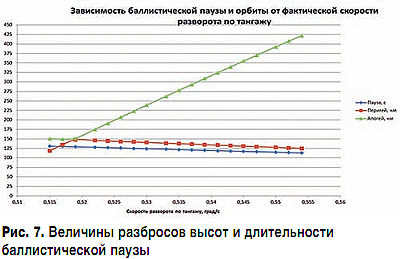
ąĪą╗ąĄą┤čāąĄčé ąŠčéą╝ąĄčéąĖčéčī, čćč鹊 ą▓čüčÅ ąŠč鹊ą▒čĆą░ąČą░ąĄą╝ą░čÅ ą┐ąŠ ąŠčüąĖ ą░ą▒čüčåąĖčüčü ąŠą▒ą╗ą░čüčéčī (ąŠčé 0,51 ą│čĆą░ą┤./c ą┤ąŠ 0,56 ą│čĆą░ą┤./c) ŌĆō čŹč鹊 ąŠčéą║ą╗ąŠąĮąĄąĮąĖąĄ ┬▒2 LSB ą┤ą░čéčćąĖą║ą░ ADIS16300, čéą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, ą┤ą░ąČąĄ čü ą║ąŠčĆčĆąĄą║čåąĖąĄą╣ ą┐ąŠ ąĪąŠą╗ąĮčåčā ą▓čŗą▓ąĄą┤ąĄąĮąĖąĄ ąĮą░ ąŠčĆą▒ąĖčéčā čü čéą░ą║ąĖą╝ ąĮąĖąĘą║ąĖą╝ ą┐ąĄčĆąĖą│ąĄąĄą╝ ąĮą░čģąŠą┤ąĖčéčüčÅ ąĮą░ ą┐čĆąĄą┤ąĄą╗ąĄ č鹊čćąĮąŠčüčéąĮčŗčģ ą▓ąŠąĘą╝ąŠąČąĮąŠčüč鹥ą╣ čŹč鹊ą│ąŠ ą│ąĖčĆąŠčüą║ąŠą┐ą░. ąĢčüą╗ąĖ, ąŠą┤ąĮą░ą║ąŠ, čāą╝ąĄąĮčīčłąĖčéčī ą▓ąĄą╗ąĖčćąĖąĮčā ą┐ąŠą╗ąĄąĘąĮąŠą╣ ąĮą░ą│čĆčāąĘą║ąĖ ąĖ ą▓čŗą▒čĆą░čéčī ąŠčĆą▒ąĖčéčā čü ą▒ąŠą╗ąĄąĄ ą▓čŗčüąŠą║ąĖą╝ ą┐ąĄčĆąĖą│ąĄąĄą╝ (240ŌĆō300 ą║ą╝), č鹊 ą┤ąĖą░ą┐ą░ąĘąŠąĮ ą▓ąŠąĘą╝ąŠąČąĮčŗčģ ąŠčłąĖą▒ąŠą║, ą┐čĆąĖ ą║ąŠč鹊čĆčŗčģ ą▓čŗą▓ąĄą┤ąĄąĮąĖąĄ ąĮą░ čüčéą░ą▒ąĖą╗čīąĮčāčÄ ąŠčĆą▒ąĖčéčā (ą┐čāčüčéčī ąĖ ąŠčéą╗ąĖčćą░čÄčēčāčÄčüčÅ ąŠčé čåąĄą╗ąĄą▓ąŠą╣ ą▓ ąĮąĄą║ąŠč鹊čĆąŠą╣ čüč鹥ą┐ąĄąĮąĖ), ąĘą░ą╝ąĄčéąĮąŠ čāą▓ąĄą╗ąĖčćąĖčéčüčÅ.
ąöą╗čÅ ąŠčåąĄąĮą║ąĖ ą▓ą╗ąĖčÅąĮąĖčÅ ą▓ąĖą▒čĆą░čåąĖą╣ ąĮą░ č鹊čćąĮąŠčüčéčī ą┤ą░čéčćąĖą║ąŠą▓ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ą╗čüčÅ čüą░ą╝ąŠą┤ąĄą╗čīąĮčŗą╣ ą▓ąĖą▒čĆąŠčüč鹥ąĮą┤ ąĖąĘ čüą░ą▒ą▓čāč乥čĆą░ ąĖ čāčüąĖą╗ąĖč鹥ą╗čÅ ą╝ąŠčēąĮąŠčüčéąĖ ąĘą▓čāą║ąŠą▓ąŠą╣ čćą░čüč鹊čéčŗ (ąŻą£ąŚą¦), ąŠą▒ąĄčüą┐ąĄčćąĖą▓ą░čÄčēąĖą╣ ą░ą╝ą┐ą╗ąĖčéčāą┤čā ą▓ąĖą▒čĆą░čåąĖąŠąĮąĮąŠą│ąŠ čāčüą║ąŠčĆąĄąĮąĖčÅ ą┤ąŠ 25 g ąĮą░ čćą░čüč鹊č鹥 40 ąōčå. ąŻčüą║ąŠčĆąĄąĮąĖąĄ ą║ąŠąĮčéčĆąŠą╗ąĖčĆąŠą▓ą░ą╗ąŠčüčī ą┐ąŠ ą▓ąĮąĄčłąĮąĄą╝čā ą░ą║čüąĄą╗ąĄčĆąŠą╝ąĄčéčĆčā ADXL150, čéą░ą║ ą║ą░ą║ ą▓čüčéčĆąŠąĄąĮąĮčŗą╣ ą░ą║čüąĄą╗ąĄ čĆąŠą╝ąĄ čé čĆ ADIS16300 ąĖą╝ąĄąĄčé ą┤ąĖą░ą┐ą░ąĘąŠąĮ č鹊ą╗čīą║ąŠ ą┤ąŠ 3,5 g.
ąŚąĮą░čćąĖą╝ąŠą│ąŠ ą▓ą╗ąĖčÅąĮąĖčÅ ą┐ąŠ ąŠčüąĖ X ąĮą░ ą▓čŗčģąŠą┤ąĮąŠą╣ čüąĖą│ąĮą░ą╗ ą│ąĖčĆąŠčüą║ąŠą┐ą░ ąĮąĄ ąŠą▒ąĮą░čĆčāąČąĄąĮąŠ. ąÆą╗ąĖčÅąĮąĖąĄ ą┐ąŠ ąŠčüčÅą╝ Y ąĖ Z ą▓ ą┤ąĖą░ą┐ą░ąĘąŠąĮąĄ ą┤ąŠ 10 g ą╗ąĖąĮąĄą╣ąĮąŠ čü č鹊čćąĮąŠčüčéčīčÄ ąĮąĄ čģčāąČąĄ 1%, ą┐ąŠčŹč鹊ą╝čā ąĮą░ ąĘąĮą░č湥ąĮąĖąĖ ąĖąĮč鹥ą│čĆą░ą╗ą░ ąŠą▒ąĮą░čĆčāąČąĖą╝ąŠ ąĮąĄ čüą║ą░ąĘčŗą▓ą░ąĄčéčüčÅ. ą×ą▒čŖąĄą╝ ąĖčüą┐čŗčéą░ąĮąĖą╣ ąĮą░ ą▓ąĖą▒čĆąŠčüč鹥ąĮą┤ąĄ ą▒čŗą╗ąŠ čĆąĄčłąĄąĮąŠ čüąŠą║čĆą░čéąĖčéčī, čéą░ą║ ą║ą░ą║ ą▒čŗą╗ąŠ ąŠą▒ąĮą░čĆčāąČąĄąĮąŠ, čćč鹊 ą▓ąĖą▒čĆą░čåąĖčÅ ą▓ąĄą╗ąĖčćąĖąĮąŠą╣ ~0,5 ą╝/čü2, ą▓ąŠąĘąĮąĖą║ą░čÄčēą░čÅ ą▓ čĆą░ą▒ąŠč湥ą╝ čĆąĄąČąĖą╝ąĄ, ąĮą░ č鹊čćąĮąŠčüčéąĖ ąĮąĄ čüą║ą░ąĘčŗą▓ą░ąĄčéčüčÅ, ą░ ą▓čģąŠąČą┤ąĄąĮąĖąĄ ą░ą║čüąĄą╗ąĄčĆąŠą╝ąĄčéčĆą░ ą▓ ąŠą│čĆą░ąĮąĖč湥ąĮąĖąĄ ąĮąĄ ą▓ą╗ąĖčÅąĄčé ąĮą░ č鹊čćąĮąŠčüčéčī ą┐ąŠą║ą░ąĘą░ąĮąĖą╣ ą│ąĖčĆąŠčüą║ąŠą┐ą░ ą▓ą┐ą╗ąŠčéčī ą┤ąŠ 10 g.
ą¤čĆąŠą▓ąĄą┤ąĄąĮąĮčŗąĄ 菹║čüą┐ąĄčĆąĖą╝ąĄąĮčéčŗ ą┐ąŠą║ą░ąĘą░ą╗ąĖ, čćč鹊 ą┤ą╗čÅ čĆą░ą║ąĄčéčŗ čü ąŠč湥ąĮčī ą║ąŠčĆąŠčéą║ąĖą╝ ą░ą║čéąĖą▓ąĮčŗą╝ čāčćą░čüčéą║ąŠą╝ ą┐čĆąĖą╝ąĄąĮąĄąĮąĖąĄ ą┤ą░čéčćąĖą║ą░ čüąŠ čüą▓ąŠą╣čüčéą▓ą░ą╝ąĖ ADIS16300 ą┐ąŠ č鹊čćąĮąŠčüčéąĖ ąĖ čāčüč鹊ą╣čćąĖą▓ąŠčüčéąĖ ą║ ą▓ąĖą▒čĆą░čåąĖąĖ ąĖ ą┐ąĄčĆąĄą│čĆčāąĘą║ąĄ ą┐ąŠąĘą▓ąŠą╗čÅąĄčé čüąŠąĘą┤ą░čéčī čüąĖčüč鹥ą╝čā čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ, čĆąĄčłą░čÄčēčāčÄ ąĘą░ą┤ą░čćčā ą▓čŗčģąŠą┤ą░ ąĮą░ ąŠčĆą▒ąĖčéčā ą┐čĆąĖ ą▓ąĄčĆčéąĖą║ą░ą╗čīąĮąŠą╝ čüčéą░čĆč鹥. ą¤čĆąĖ čŹč鹊ą╝ čüą╗ąĄą┤čāąĄčé čāą┤ąĄą╗ąĖčéčī ą▓ąĮąĖą╝ą░ąĮąĖąĄ č鹥čĆą╝ąŠčüčéą░ą▒ąĖą╗ąĖąĘą░čåąĖąĖ ą┤ą░čéčćąĖą║ą░ ą▓ čüąŠčüčéą░ą▓ąĄ ąĪąŻ, ą┐čĆą░ą▓ąĖą╗čīąĮąŠą╣ ąĄą│ąŠ ąŠčĆąĖąĄąĮčéą░čåąĖąĖ (ąŠčüčīčÄ ąź ą┐ąŠ ą┐čĆąŠą┤ąŠą╗čīąĮąŠą╣ ąŠčüąĖ čĆą░ą║ąĄčéčŗ), ą░ čéą░ą║ąČąĄ ą░ą┤ąĄą║ą▓ą░čéąĮąŠą╣ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠą╣ ąŠą▒čĆą░ą▒ąŠčéą║ąĄ ą┤ą░ąĮąĮčŗčģ. ą¢ąĄą╗ą░č鹥ą╗čīąĮąŠ ąĖą╝ąĄčéčī ą╝ąĄąĮčīčłčāčÄ ą┤ąĖčüą║čĆąĄčéąĮąŠčüčéčī ą▓čŗčģąŠą┤ąĮčŗčģ ą┤ą░ąĮąĮčŗčģ, čćč鹊 ą╝ąŠąČąĄčé ąŠą▒ą╗ąĄą│čćąĖčéčī ą║ą░ą╗ąĖą▒čĆąŠą▓ą║čā ąĮčāą╗čÅ. ąŁč鹊 ą┤ąŠčüčéąĖąČąĖą╝ąŠ ą▓ ą┤ą░čéčćąĖą║ąĄ čüą╗ąĄą┤čāčÄčēąĄą│ąŠ ą┐ąŠą║ąŠą╗ąĄąĮąĖčÅ ADIS16445 ąĖą╗ąĖ ą┐čĆąĖ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĖ ą┤ą░čéčćąĖą║ą░ čü ą░ąĮą░ą╗ąŠą│ąŠą▓čŗą╝ ą▓čŗčģąŠą┤ąŠą╝, ąĮą░ą┐čĆąĖą╝ąĄčĆ ADXRS646-EP, čüąŠą▓ą╝ąĄčüčéąĮąŠ čü 16-čĆą░ąĘčĆčÅą┤ąĮčŗą╝ ąÉą”ą¤.
ąöą╗čÅ čĆą░ą║ąĄčé čü čéąĖą┐ąĖčćąĮčŗą╝ąĖ ą┐ą░čĆą░ą╝ąĄčéčĆą░ą╝ąĖ ą░ą║čéąĖą▓ąĮąŠą│ąŠ čāčćą░čüčéą║ą░, ąŠčüąŠą▒ąĄąĮąĮąŠ ŌĆō ą╝ąĮąŠą│ąŠčüčéčāą┐ąĄąĮčćą░čéčŗčģ ąČąĖą┤ą║ąŠčüčéąĮčŗčģ, č鹊čćąĮąŠčüčéčī ADIS16300 ąĮąĄą┤ąŠčüčéą░č鹊čćąĮą░ ąĖ čéčĆąĄą▒čāąĄčé ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠą╣ ą║ąŠčĆčĆąĄą║čåąĖąĖ, ąĮą░ą┐čĆąĖą╝ąĄčĆ čü ą┐ąŠą╝ąŠčēčīčÄ ąŠą┤ąĮąŠąŠčüąĮąŠą╣ čüąŠą╗ąĮąĄčćąĮąŠą╣ ąŠčĆąĖąĄąĮčéą░čåąĖąĖ. ąÜ čüąŠąČą░ą╗ąĄąĮąĖčÄ, ąŠą▒čŖąĄą╝ čüčéą░čéčīąĖ ąĮąĄ ą┐ąŠąĘą▓ąŠą╗ąĖą╗ ą▓ą║ą╗čÄčćąĖčéčī ą▓ ąĮąĄąĄ ąŠą┐ąĖčüą░ąĮąĖąĄ čĆą░ą▒ąŠčéčŗ čü ą┤ą░čéčćąĖą║ąŠą╝ čüąŠą╗ąĮčåą░, čģąŠčéčÅ ą▓ čüąŠčüčéą░ą▓ąĄ čāčüčéą░ąĮąŠą▓ą║ąĖ ą┤ą░čéčćąĖą║ ą▒čŗą╗.
ą¤ą░čĆą░ą╝ąĄčéčĆčŗ č鹊čćąĮąŠčüčéąĖ, ąŠą│čĆą░ąĮąĖčćąĖą▓ą░ąĄą╝čŗąĄ ą┤ą░čéčćąĖą║ąŠą╝:
ąøąĖč鹥čĆą░čéčāčĆą░
ą×ą┐čāą▒ą╗ąĖą║ąŠą▓ą░ąĮąŠ: ą¢čāčĆąĮą░ą╗ "ąóąĄčģąĮąŠą╗ąŠą│ąĖąĖ ąĖ čüčĆąĄą┤čüčéą▓ą░ čüą▓čÅąĘąĖ" #3, 2016
ą¤ąŠčüąĄčēąĄąĮąĖą╣: 6599
ąÉą▓č鹊čĆ
| |||
ąÆ čĆčāą▒čĆąĖą║čā "ąĪą┐čāčéąĮąĖą║ąŠą▓ą░čÅ čüą▓čÅąĘčī" | ąÜ čüą┐ąĖčüą║čā čĆčāą▒čĆąĖą║ | ąÜ čüą┐ąĖčüą║čā ą░ą▓č鹊čĆąŠą▓ | ąÜ čüą┐ąĖčüą║čā ą┐čāą▒ą╗ąĖą║ą░čåąĖą╣


