
В рубрику "Спутниковая связь" | К списку рубрик | К списку авторов | К списку публикаций
Геннадий Верзунов
Руководитель центра программных исследований и маркетинга
ФГУП "НПЦ "Вигстар"

Петр Корвяков
Первый заместитель генерального директора ОАО
"Газком"

Виктор Могучев
Руководитель центра общесистемных исследований ФГУП
"НПЦ "Вигстар", к.т.н., с.н.с.

Операторы спутниковой связи несут реальные убытки от несанкционированного использования их частотно-энергетического ресурса. Арсенал способов борьбы с этим явлением крайне ограничен и в целом малоэффективен. А между тем местоположение "пиратов" или просто источников мешающих сигналов можно определять достаточно точно и далее вести борьбу с ними вполне правовыми методами. Для этого уже существуют технологии, и не только зарубежные, но и российские.
Все операторы сетей связи, использующие спутники-ретрансляторы на геостационарной орбите, сталкиваются с воздействием радиопомех или несанкционированным использованием частотно-энергетического ресурса. От того, насколько быстро и эффективно операторы способны бороться с этими явлениями, зависят размеры их потерь и, главное, потерь конечных пользователей, также страдающих от воздействия радиопомех и несанкционированного доступа. Острота этой проблемы возрастает в геометрической прогрессии с ростом загрузки транспондеров, поскольку уменьшается возможность маневра в использовании резервных частот, а появление практически любого внесистемного сигнала приводит к поражению действующих каналов. Во всяком случае, рост подобных потерь диктует необходимость инвестиций в защитные технологии. Наиболее широко операторы используют сегодня метод радиоподавления пиратских сигналов более мощными сигналами своей земной станции. Однако этот метод:
• не всегда применим, так как в условиях большой загрузки способен привести к неприемлемому возрастанию интермодуляционных помех всем полезным сигналам в транспондере;
• не гарантирует от появления "пиратов" на других участках частотного спектра, что, собственно, и происходит на практике;
• абсолютно неэффективен в случае паразитных или ошибочно установленных сигналов, факт излучения которых зачастую неизвестен даже владельцам излучающих их средств.
С точки зрения российских правовых отношений и действующих законодательных актов в области использования радиочастотного спектра легитимной является следующая цепочка действий при обнаружении оператором факта появления внесистемных сигналов:
• направление заявки о воздействии помехи;
• определение местоположения внесистемного, "пиратского" объекта (сертифицированными средствами либо самого оператора, либо радиочастотных органов);
• борьба с ним административными, юридическими методами, вплоть до судебных, со стороны государственных радиочастотных органов.
Другими словами, при очевидной заинтересованности операторов в решении данной проблемы конечная ответственность за обеспечение эксплуатационной готовности частотного спутникового ресурса лежит на государственных органах.
Для вариантов, когда источник внесистемного излучения находится вне территории России, проблема становится еще более сложной: до настоящего времени Международным союзом электросвязи не приняты нормативно-правовые документы, регламентирующие процедуры исключения действия подобных помех. В этом случае система определения местоположения должна иметь международный сертификат, а заявка направляется от имени Администрации связи России.
Становится ясной важность решения данной проблемы на государственном уровне:
• с одной стороны – постоянный рост объемов спутниковых услуг у нас в стране (в среднем на 15-20% в год), ключевая роль спутниковой связи в федеральной системе телевизионного вещания, стремительный рост числа корпоративных и ведомственных сетей VSAT (в том числе в рамках национальных проектов);
• с другой – почти полная загрузка спутникового ресурса у национальных операторов.
Технология радиопеленгации земных станций спутниковой связи по ретранслированному через геостационарные спутники радиосигналу достаточно хорошо проработана и доведена до реализации [1 – 4]. В зарубежной литературе эта технология называется "геолокация", то есть буквально -определение географического местоположения. В существующих технологиях радиопеленгации или геолокации необходимо использовать на геостационарной орбите два или более спутников связи, отстоящих друг от друга на несколько градусов. Причем зональные, частотные и поляризационые планы ретрансляторов нескольких спутников, участвующих в измерениях, должны быть максимально близкими, что далеко не всегда возможно на практике. Российские технологии [5 – 7] позволяют проводить радиопеленгацию с использованием одиночного геостационарного спутника. При этом должен соблюдаться принцип создания минимальных проблем объекту защиты со стороны защитной системы. Исходя из этого принципа, можно сформулировать некоторые общие требования:
1. Для реализации такой технологии используются естественные периодические эволюции (эфемериды) геостационарного спутника относительно номинальной орбитальной позиции. Выполнение спутником специальных маневров не требуется.
2. Должна обеспечиваться возможность проведения измерений с использованием одиночного геостационарного спутника.
3. Применяется метод измерений и анализа параметров ретранслируемых сигналов. Технология не должна оказывать влияния на работу сетей связи.
4. Для уточнения результатов измерений используется баллистическая информация из центра управления полетом и данные о местоположении группы земных станций, работающих в данной сети.
Точность поддержания параметров орбиты современных спутников связи составляет 0,05...0,1° по долготе и наклонению. В линейных величинах это будет составлять 10... 100 км относительно номинала орбитальной позиции, что характерно для большинства геостационарных спутников связи.
Разнесенные в пространстве орбитальные положения одного или нескольких спутников служат навигационными точками для дальномерных измерений или конечными точками стереобазы для дальномерно-разностных измерений по сигналу, ретранслированному через этот спутник от искомого источника излучения.
Операторы могут создавать подсистемы радиопеленгации, используя уже имеющееся оборудование. На рис. 1 представлена архитектура такой подсистемы, которая состоит из трех основных элементов, уже имеющихся в системах связи и управления полетом:
• центр управления полетом (ЦУП);
• группа земных станций (4 – 7 станций) из числа входящих в систему;
• центральная земная станция (ЦЗС) системы с антенной достаточно большой апертуры, дооснащенная измерительными модемами.
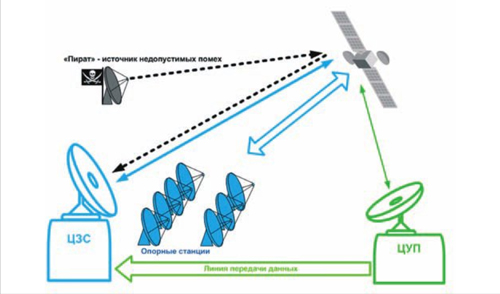
Рис.1. Архитектура
подсистемы навигации-позиционирования и радиопеленгации
Данные радиоконтроля орбиты (РКО) передаются из ЦУП на ЦЗС в реальном времени или в архивном режиме. С использованием этих данных вычисляются пространственные трехмерные координаты навигационных точек или конечных точек стереобаз геостационарного спутника связи. Группа земных станций, входящих в систему, географические (геодезические) координаты которых известны с необходимой точностью, образует систему опорных станций или радиомаяков. С их помощью решается задача определения поправок координат навигации и позиционирования. Координаты позиционируемых станций определяются путем цифровой и программно-вычислительной обработки [2, 7, 8] параметров (огибающей) ретранслированных сигналов совместно с данными РКО. Это возможно осуществить как в реальном масштабе времени, так и в архивном режиме. Разница полученных значений координат опорных станций и их априори известных географических координат составит поправку, которую необходимо учесть при решении задачи пеленгации "пиратской" станции. Математическое моделирование ключевых алгоритмов радиопеленгации и навигации в режиме прямой ретрансляции дает количественные оценки их алгоритмической точности и практически достижимой погрешности при выявлении местоположения источников полезных сигналов и внесистемных помех. Алгоритмическая ошибка целеуказания с использованием реальных экспериментальных данных РКО спутника семейства "Ямал" (90° в.д.) или спутника семейства "Экспресс" (40° в.д.) не превышает ±(0,75...1,25x1,5...2,5) км и определяется в основном локальным расхождением геодезических координат объекта на территории России с поверхностью принятой модели Земли.
При приемлемых парциальных ошибках реализации процедур предложенных алгоритмов навигации-позиционирования и радиопеленгации искомого объекта и с внесением поправок по данным опорных станций (радиомаяков) зона неопределенности местоположения цели на местности прогнозируется в пределах 3,5...7x5...25 км. Уже исследованы методы интерполяции и коррекции ошибок навигации-позиционирования, а также радиопеленгации объекта. Разработаны методы обеспечения и повышения точности координат искомых объектов по данным группы известных опорных станций системы связи. Главный результат проведенных исследований – продемонстрированы возможности навигации и пеленгации станций через одиночный геостационарный спутник связи с использованием реальных данных радиоконтроля орбиты и эфемерид его полета в окрестности номинала орбитальной позиции с любой заданной долготой.
Суточные эфемериды спутника навигации и радиопеленгации экспериментально подтверждены с использованием данных РКО спутников семейства "Ямал" и "Экспресс". На рисунках 2а и 26 представлены данные РКО спутника по высоте (R), широте (F) и долготе (L), а также его суточные эфемериды.
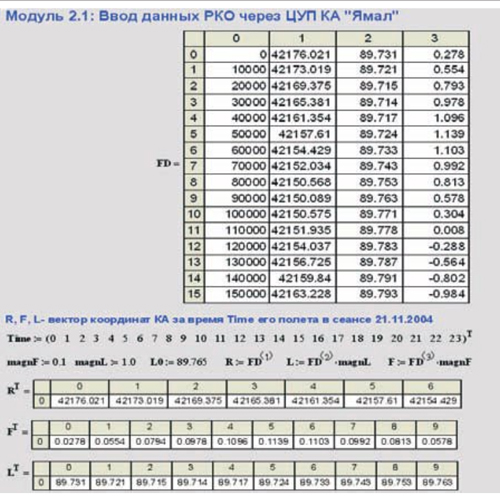
Рис. 2а. Данные РКО
по высоте R, широте F и долготе L
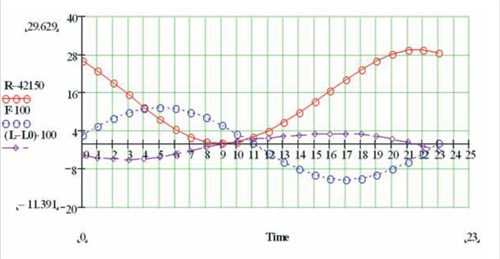
Рис.2б. Суточные
эфемериды спутника
Трехмерная навигация системного объекта
Принцип навигации [10] системных объектов в предлагаемой
системе аналогичен системам ГЛОНАСС/GPS и основан на измерениях множества
наклонных дальностей SRI, SR2, SR3 и т.д. объекта М (х, у, z) до нескольких,
например, 3 – 4 точек эфемерид одиночного спутника с известными координатами S1
(X1, Y1, Z1), S2 (X2, Y2, Z2), Е , S4 (X4, Y4, Z4) и засечки общей искомой
точки пересечения данных сфер в пространстве. Математическая обработка таких
данных позволяет:
1) построить
точку пересечения (засечки) 3-4 полученных сфер геометрического места точек
(ГМТ) с измеренными радиусами SR1, SR2, SR3, ..., SRk и центрами в разнесенных
позициях спутника связи, выявляющую положение объекта М (х, у, z), как корень решения системы координатных уравнений (1);
2) в системе из
нескольких уравнений сфер с радиусами дальномерных измерений SRk для объектов
земного базирования можно дополнительно учесть подстилающую поверхность сферы с
радиусом Земли RE.
Математическая обработка включает в себя решение системы уравнений:
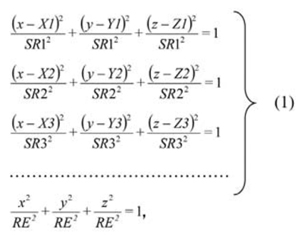
где X1, Yl, Z1 – координаты I орбитальной позиции спутника;
Х2, Y2, Z2 – координаты II орбитальной позиции;
ХЗ, Y3, Z3 – координаты III орбитальной позиции;
SR1 – радиус k-й сферической поверхности ГМТ положения; RE – радиус земной сферы. Здесь координаты k-й орбитальной позиции спутника являются центрами соответствующих сфер ГМТ его пространственного положения. Алгоритмическая ошибка навигации земной станции, входящей в систему, и ее позиционирование (определение собственного местоположения) через четыре (или более) навигационных точки практически близка к нескольким десяткам метров. Навигация системной станции по 2 – 3 навигационным точкам спутника и подстилающей поверхности обеспечивает величину алгоритмической ошибки с локальными погрешностями профиля модели Земли относительно геодезических координат порядка ± (1,5...2,5) км. Листинг решения координатных уравнений навигации-позиционирования приведен на рис. 3.

Рис. 3. Листинг
решения задачи навигации-позиционирования
Фактическая точность также зависит от неконтролируемого центром управления пространственного дрейфа геостационарного спутника по орбите. Однако современная технология, во-первых, обеспечивает достаточную точность РКО (порядка 10 – 15 м), а во-вторых, привносимая погрешность может корректироваться по данным опорных станций (радиомаяков) соответствующего региона [10]. Полнофункциональное математическое моделирование процедуры навигации подтвердило возможность ее выполнения как через одиночный спутник связи на ГСО – на основе его 3 – 4 известных эфемерид, так и через группу подобных спутников.
Длительность процедуры навигации определяется, главным образом, затратами времени на измерения наклонной дальности по любым 3 – 4 позициям группы спутников – от нескольких минут до получаса, или же суммарным временем перемещения одиночного спутника по 3 – 4 позициям эфемерид, что составит порядка нескольких часов.
Местоположение М (х, у, z) внесистемного объекта – "пиратской" станции определяется путем измерений множества дифференциальных наклонных дальностей DifRl, DifR2, DifR3 и т.д. этого объекта до нескольких известных, например трех-четырех или более, попарно взятых орбитальных позиций – стереобаз спутников между точками S1 (X1, Y1, Z1) -S2 (X2, Y2, Z2), S3 (X3, Y3, Z3) -S4 (Х4, Y4, Z4) и т.д. с фиксированными координатами. В качестве конечных точек таких стереобаз служат смещенные по времени эфемериды положения одиночного геостационарного спутника связи в окрестности номинала его орбитальной позиции. Математическая обработка этих данных включает в себя решение системы уравнений:
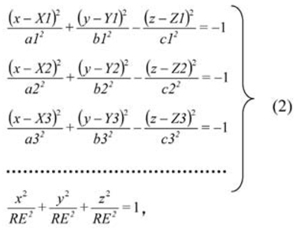
где XI, Yl, Z1 – ЗО-координаты центра I стереобазы;
Х2, Y2, Z2 – ЗБ-координаты центра II стереобазы;
ХЗ, Y3, Z3 – ЗБ-координаты центра III стереобазы;
a1, b1, c1 – параметры I гиперболической поверхности ГМТ; RE – радиус земной сферы. Она позволяет также:
1. Вычислить параметры a1, b1, c1 каждой I гиперболической поверхности ГМТ положения объекта.
2. Построить общую точку нескольких гиперболических поверхностей ГМТ положения объекта, для чего решить систему уравнений (2) вычисления их общего корня – пространственных координат искомой точки М (х, у, z) пересечения указанных поверхностей.
3. В системе из нескольких уравнений гиперболических поверхностей для земного объекта М (х, у, z) можно дополнительно учесть модель Земли, например сферу с радиусом Земли RE.
В ходе моделирования использовалась сферическая система координат (ССК) – для модели Земли и декартова геоцентрическая система (ГСК) – для пространственной модели навигации и радиопеленгации. При этом возникает систематическая ошибка расхождения геодезических координат относительно поверхности земной сферы, модуль которой может достигать 8 км. Для ее минимизации предпочтительно использовать модель референц-эллипсоида Земли с поправками Красовского [9]. Листинг решения координатных уравнений радиопеленгации приведен на рис. 4. Получаемый вектор линейных координат М (х, у, z) следует преобразовать из ГСК в географические координаты ССК искомой точки М (μ, Θ, ρ) модели, которые наносятся на глобус или подходящую карту Земли. Алгоритмическая точность вычисления координат пеленгуемого объекта М (х, у, z) по разнесенным позициям двух-трех геостационарных спутников с орбитальным разносом 1-3° в глобальной зоне их совместной радиовидимости (18x18°) ограничена ошибкой численного решения (2) и имеет порядок 150 – 750 м. Такие же результаты достигаются и по семейству смещенных эфемерид одиночного геостационарного спутника. Длительность процедуры радиопеленгации определяется, в основном, суммарным временем измерений дифференциальных дальностей:
• для выборки стереобаз с раздельными орбитальными позициями созвездия из двух или более спутников – несколько десятков минут;
• для эфемерид перемещений одиночного спутника – порядка нескольких часов.
Выполненные исследования позволяют предложить основные системные параметры, которые представлены в табл. 1.
Таблица 1. Основные
параметры подсистемы навигации-позиционирования и радиопеленгации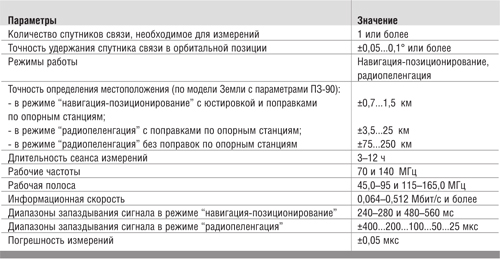
Список специального оборудования и программного обеспечения в составе ЦЗС, необходимого для дооснащения системы спутниковой связи подсистемой навигации-позиционирования и радиолокации, состоит из следующих позиций:
1) одноканальный дальномерный модем (ДММ) для измерений наклонной дальности;
2) многоканальный дальномерно-разностный модем (ДРМ) для групповых измерений дифференциальной дальности;
3) стандарт частоты и времени с точностью не хуже ε = 10-12;
4) компьютерный сервер (профессиональный ПК) обработки результатов и моделирования процедур пеленгации и навигации;
5) пакет специального программно-математического обеспечения (ПМО) для обработки данных РКО спутника, определения координат земных станций и формирования баз данных.
Оригинальными в этом перечне являются приборы ДММ, ДРМ и специальное ПМО.
Оснащение системы спутниковой связи подсистемой навигации-позиционирования и радиопеленгации создает для оператора существенные преимущества. Самое главное – появляется возможность достаточно быстро и эффективно выявить источники непреднамеренных помех и несанкционированного доступа и вести с ними последовательную борьбу на правовой основе с участием государственных радиочастотных органов. Информация обо всех выявленных объектах такого рода станет храниться в базе данных, и в случае необходимости (повторное нарушение) объекты могут быть оперативно идентифицированы. Кроме того, оператор будет создавать цифровые карты местоположения станций спутниковой связи и осуществлять оперативный мониторинг перемещаемых станций, например возимых или корабельных. Наличие такой системы в структуре центральных или региональных радиочастотных органов позволит резко повысить оперативность поиска источников внесистемного излучения и, таким образом, решить одну из главных задач этих органов – обеспечить эксплуатационную готовность национального радиочастотного ресурса.
1. Haworth D. P., Smith N. G., Bardelli R., Clement T. Interference localization for Eutelsat satellites – the first European transmitter location system, International Journal of satellite communications, Vol. 15, 1997, P. 155-183.
2. C. Privat, L. Sterenberg Interference Detection and Geolocation System, Technical Proposals, Alcatel Alenia Space, 2005.
3. Вейцель В. В., Белоглазов В. В., Левитан Б. А. Доклад "Как найти злоумышленника в спутниковой сети". Материалы конференции icsc'98.
4. Паутов Г. В. Выявление и устранение радиопомех в спутниковой связи, Москва, "Спутниковая связь и вещание", 2008.
5. Герасимов В. В., Ляховкин А.А., Могучев В. И. Доклад "Выявление местоположения абонентских ЗС при несанкционированном доступе в спутниковых системах связи". Материалы конференции icsc'98.
6. Могучев В. И. Допплеровская пеленгация земных станций через геостационарный спутник связи, "Электросвязь", 2003. №1.
7. Могучев В. И. Дифференциальная пеленгация земных станций через геостационарный спутник, "Электросвязь", 2004. №6.
8. Панько С. П., Сухотин В. В. Несанкционированный доступ в системы спутниковых коммуникаций, "Успехи современной радиоэлектроники", 2002. №4.
9. Машбиц Л. М. Компьютерная картография и зоны спутниковой связи, "Радио и Связь", 2000.
10. Бакитько Р. В.,Булавский Н. Т., Горев А. П., Дворкин В. В. и др. ГЛОНАСС. Принципы построения и функционирования, Москва, "Радиотехника", 2005.
Опубликовано: Специальный выпуск "Спутниковая связь и вещание"-2009
Посещений: 17688
Статьи по теме
Автор
| |||
Автор
| |||
Автор
| |||
В рубрику "Спутниковая связь" | К списку рубрик | К списку авторов | К списку публикаций